





























Maintenance 5. Replacing the Motors (Joint #1)
E2C Rev.6
109
5.3 Replacing the Joint #1 Motor
The procedure for replacing the Joint #1 motor varies with the Manipulator used.
5.3.1 S, C Type Manipulators
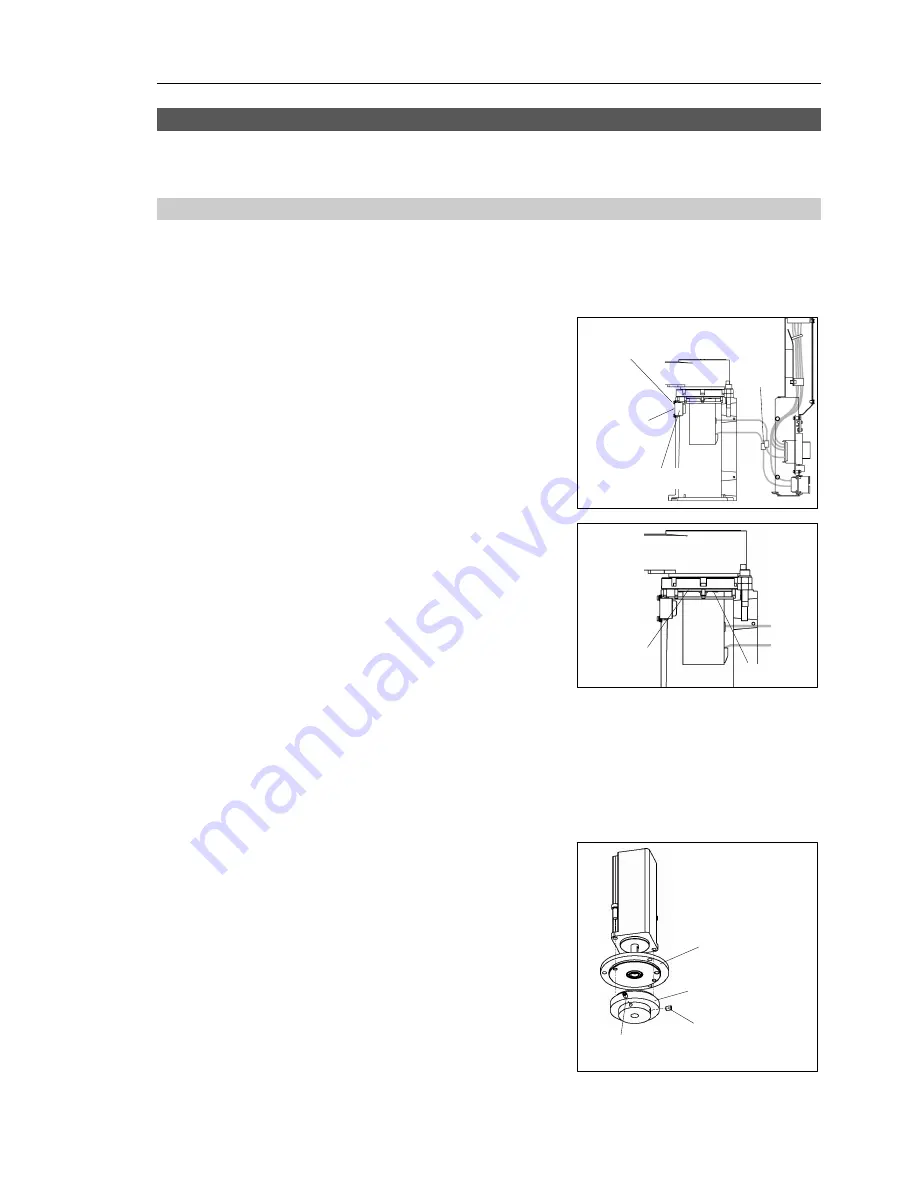
Removal
(1) Remove the base connector box.
For details on the removal method, refer to
Maintenance: 3.4 Base Connector Box
.
(2) Remove
the
maintenance
plate.
(3) Disconnect the connectors X110 and X11.
To disconnect the X110 connector, pull it
out while pushing the projection next to the
connector.
Maintenance
plate
Maintenance hole
2-M3
×
6
double-sems screw
X11
X110
(4) Remove the Joint #1 motor unit from the
base.
To do so, unscrew the bolts from the Joint
#1 motor flange. Then, pull out the motor
straight and downward.
To unscrew bolts on the maintenance hole
side, insert a hexagonal wrench from the
maintenance hole.
Be careful not to lose the oil seal coated
with black rubber.
If the motor cannot be pulled out easily,
pull it out while moving Arm #1 slowly by
hand.
Motor flange
3-M4
×
10
(5) Remove the waveform generator from the
Joint #1 motor.
There is a brass bushing in one of the
setscrew holes. Be careful not to lose it.
(6) Remove the motor flange from the Joint #1
motor.
Bushing
M4
×
6
Waveform generator
Motor flange
M4
×
6
)
NOTE
Summary of Contents for E2C Series
Page 1: ...SCARA ROBOT E2C series MANIPULATOR MANUAL Rev 6 EM069R1409F ...
Page 2: ...MANIPULATOR MANUAL E2C series Rev 6 ...
Page 8: ...vi E2C Rev 6 ...
Page 14: ......
Page 82: ......
Page 92: ...Maintenance 2 General Maintenance 80 E2C Rev 6 ...
Page 118: ...Maintenance 4 Replacing the Cable Unit 106 E2C Rev 6 ...
Page 194: ...Maintenance 11 Replacing the Signal Relay Board 182 E2C Rev 6 ...







































































