





























Maintenance 6. Replacing the Reduction Gear Units (Joint #
1
)
E2C Rev.6
127
6.5 Replacing the Joint #
1
Reduction Gear Unit
The procedure for replacing the Joint #1 reduction gear unit varies with the Manipulator
used.
6.5.
1
S, C Type Manipulators
Removal
(1) Remove the power cable and signal cable from the base connector box (outside).
(2) Remove the Joint #1 cover.
For details on the removal method, refer to
Maintenance: 3.3 Joint #1 Cover
.
CAUTION
■
When removing or installing the arm, there must be two or more people to work
on it so that at least one of them can support the arm while others are removing
the bolts. Removing the bolts without supporting may result in fall of the arm,
bodily injury, and/or malfunction of the robot system.
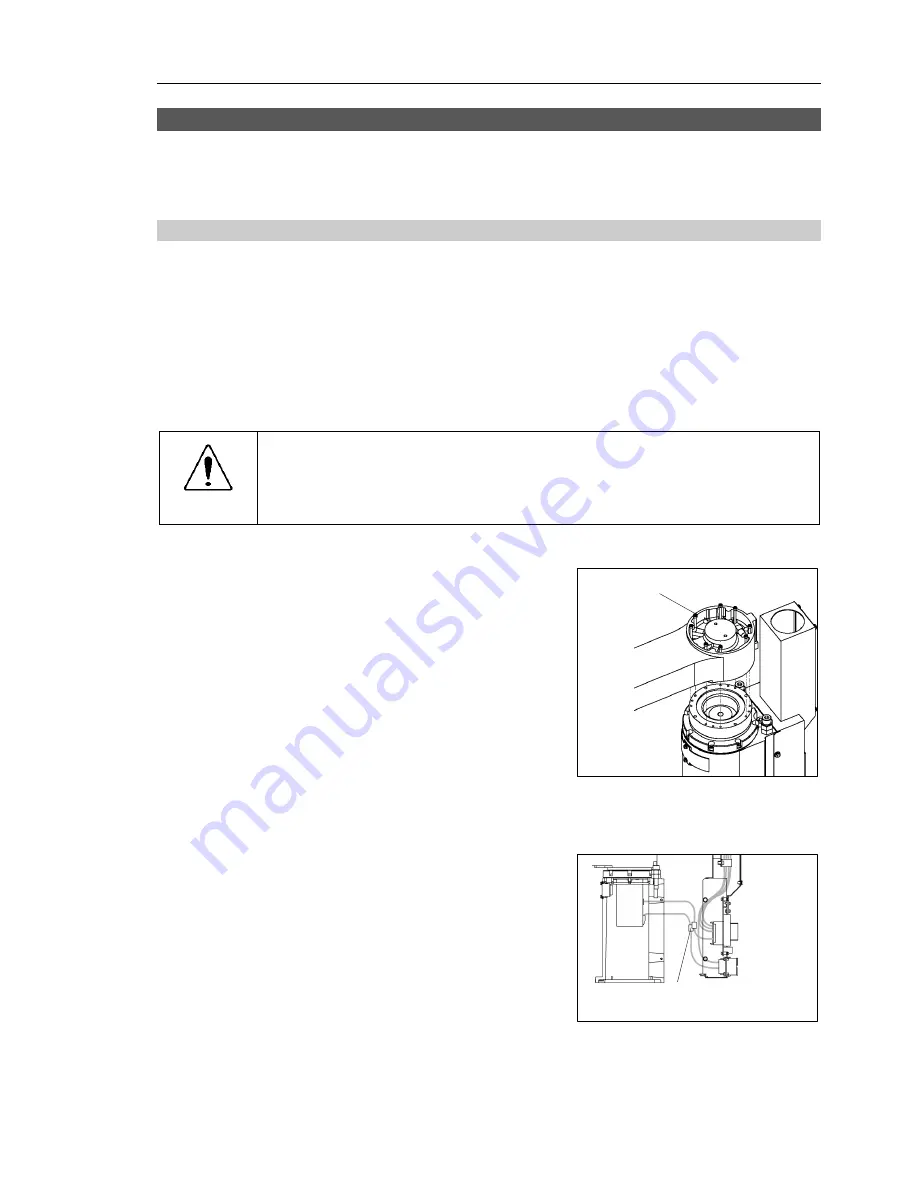
(3) Remove Arm #1 from the base.
To do so, support the Arm #1 with two or
more people. Then, have another person
unscrew the mounting bolts from Arm #1.
Place the removed arm gently on the floor
to avoid shock.
8-M3
×
35 with plain washer
(4) Remove the base connector box.
For details on the removal method, refer to
Maintenance: 3.4 Base Connector Box
.
(5) Disconnect the connectors X110 and X11.
To disconnect the X110 connector, pull it
out while pushing the projection next to the
connector.
X
11
X
11
0
Summary of Contents for E2C Series
Page 1: ...SCARA ROBOT E2C series MANIPULATOR MANUAL Rev 6 EM069R1409F ...
Page 2: ...MANIPULATOR MANUAL E2C series Rev 6 ...
Page 8: ...vi E2C Rev 6 ...
Page 14: ......
Page 82: ......
Page 92: ...Maintenance 2 General Maintenance 80 E2C Rev 6 ...
Page 118: ...Maintenance 4 Replacing the Cable Unit 106 E2C Rev 6 ...
Page 194: ...Maintenance 11 Replacing the Signal Relay Board 182 E2C Rev 6 ...






































































