





























Setup & Operation 1. Safety
6
E2C Rev.6
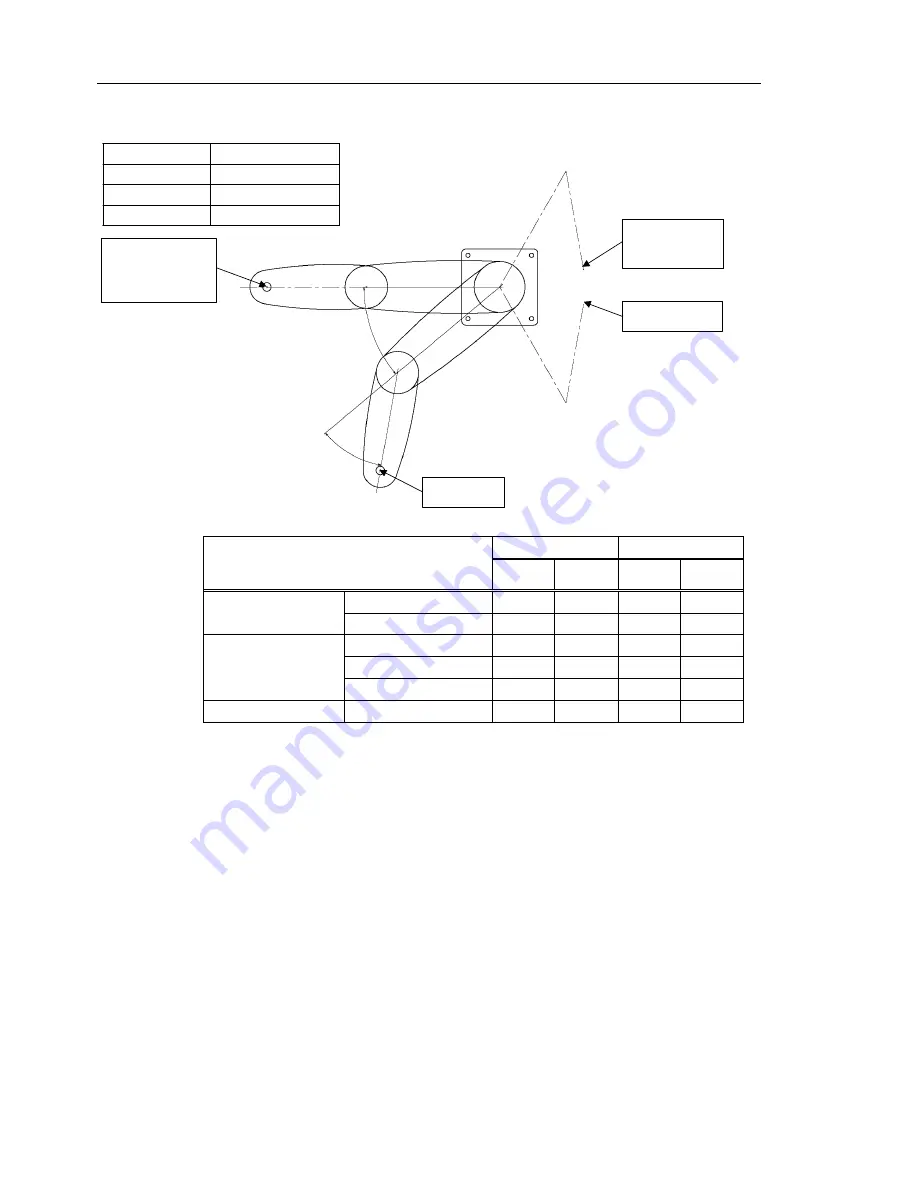
Conditions of Measurement
ACCEL Setting
100
SPEED Setting
100
Load [kg]
3
WEIGHT Setting
3
Joint #1
Point that the
emergency stop
signal is input
Start point of
operation
Target point
Stop point
Joint #2
E2C251* E2C351*
RC420
RC520
RC170
RC420
RC520
RC170
Joint #1+Joint #2 [sec.]
0.2 0.3 0.3 0.4
Free running time
Joint #3
[sec.]
0.3 0.2 0.3 0.2
Joint #1
[deg.]
20 40 35 50
Joint #2
[deg.]
30 55 35 55
Free running angle
Joint #1+Joint #2 [deg.]
50 90 70 105
Free running distance
Joint #3
[mm]
25 65 25 65
The free running distance of RC170 differs from RC520/RC420 for the differences of the
braking process.
RC170 stops with the dynamic brake after the deceleration motion as Quick Pause to keep
the operating trajectory while the robot system stops for safety.
Because of this, RC170 may increase the free running distance compared to RC520/RC420
that stop instantly with the dynamic brake at emergency.
)
NOTE
Summary of Contents for E2C Series
Page 1: ...SCARA ROBOT E2C series MANIPULATOR MANUAL Rev 6 EM069R1409F ...
Page 2: ...MANIPULATOR MANUAL E2C series Rev 6 ...
Page 8: ...vi E2C Rev 6 ...
Page 14: ......
Page 82: ......
Page 92: ...Maintenance 2 General Maintenance 80 E2C Rev 6 ...
Page 118: ...Maintenance 4 Replacing the Cable Unit 106 E2C Rev 6 ...
Page 194: ...Maintenance 11 Replacing the Signal Relay Board 182 E2C Rev 6 ...







































































