





























Setup & Operation 2. Specifications
12
E2C Rev.6
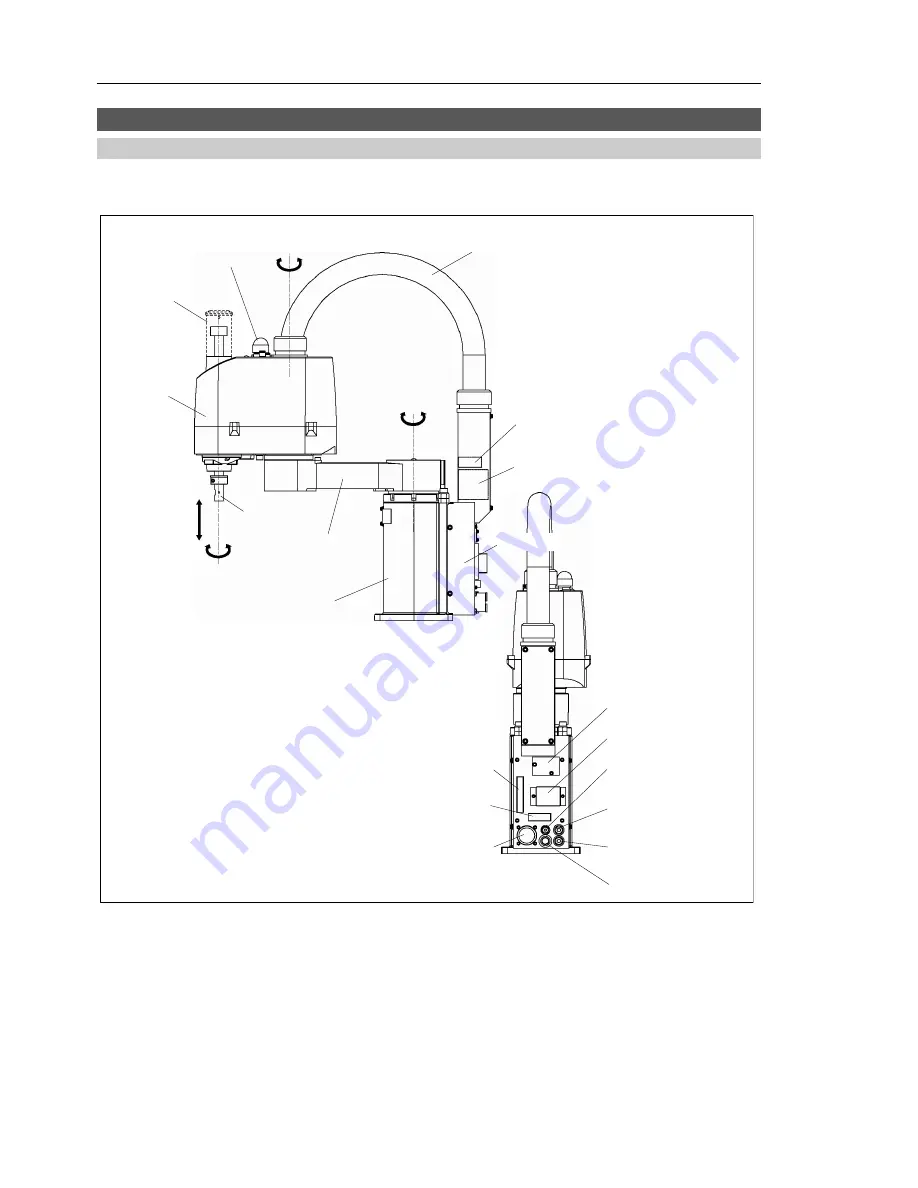
2.3 Appearance
2.3.1 Table Top Standard-model: S Type
Part Names
Joint #1
(rotating)
Joint #2
(rotating)
Joint #3
(up and down)
Joint #4
(rotating)
Arm #1
Arm #2
Base
Cable unit
Shaft cover
(only for -UL type)
Sensor monitor
Signature label
(Serial No. of Manipulator)
Fitting (black) for ø6 mm
pneumatic tube
Fitting for ø4 mm
pneumatic tube
Spare
Signal cable connector
Power cable connector
User connector
(15-pin D-sub connector)
Fitting (blue) for ø6 mm
pneumatic tube
LED
+
-
+
-
+
-
Shaft
+
-
Battery box
MT label
(only for custom specification)
Base connector box
Summary of Contents for E2C Series
Page 1: ...SCARA ROBOT E2C series MANIPULATOR MANUAL Rev 6 EM069R1409F ...
Page 2: ...MANIPULATOR MANUAL E2C series Rev 6 ...
Page 8: ...vi E2C Rev 6 ...
Page 14: ......
Page 82: ......
Page 92: ...Maintenance 2 General Maintenance 80 E2C Rev 6 ...
Page 118: ...Maintenance 4 Replacing the Cable Unit 106 E2C Rev 6 ...
Page 194: ...Maintenance 11 Replacing the Signal Relay Board 182 E2C Rev 6 ...



































































