





























Setup & Operation 2. Specifications
E2C Rev.6
17
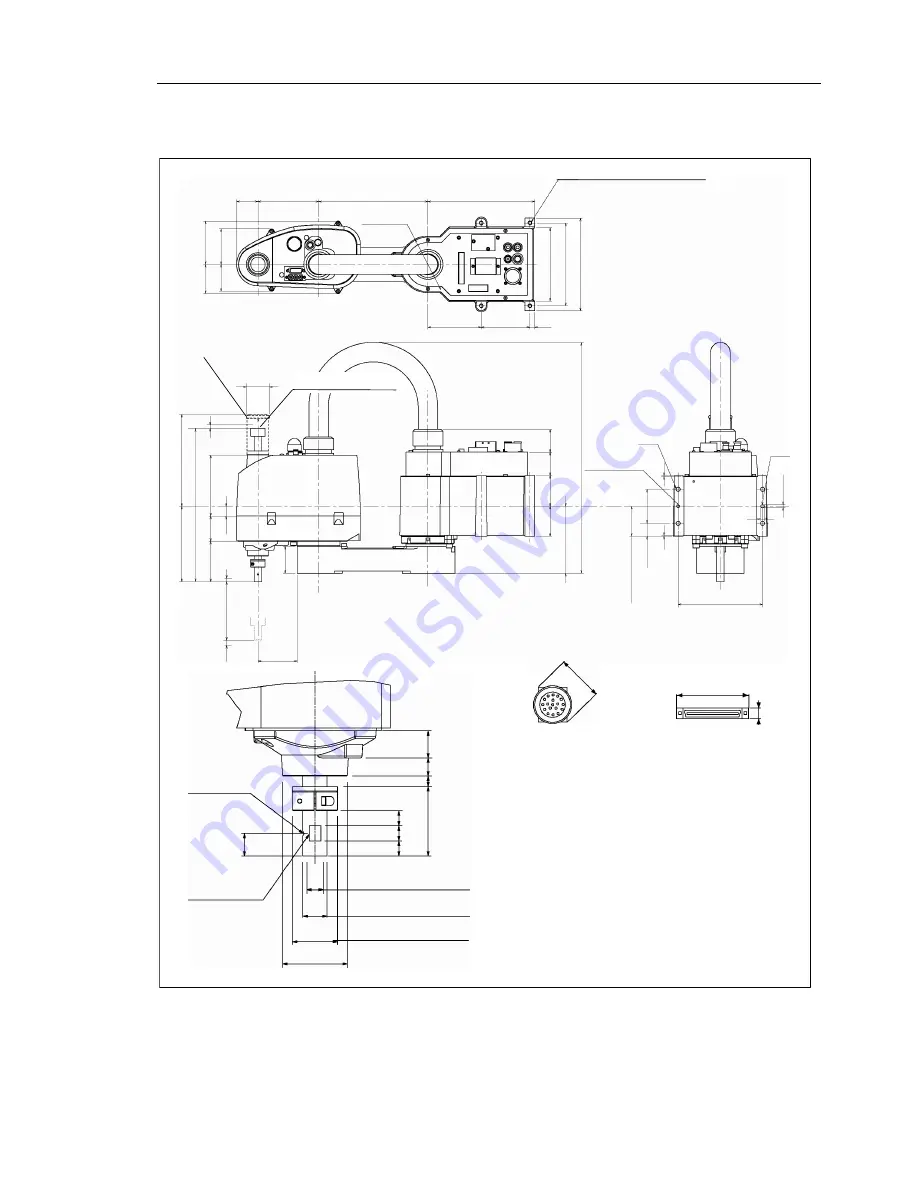
Outer Dimension
E2C351SM [unit: mm]
Power cable connector
50
Signal cable connector
65
12
ø6 H7
reference
through hole
4- ø8.5
220
±
0.05
89
170
11*
7*
31
5
ø116
M
ax
. 510
Depth: 10
61.5
±
0.0
5
174
8
6
+
0
.02
0
(*) indicates the stroke margin by mechanical stop.
225
125
44
60
55
73
190
110 100
10
ø48
125
52
83
120
20
7*
81
137.5
61.5 63
48
47
26
.5 70
150
4-M8 Depth: 16
(Both top and bottom of base)
155 18
9
55.5
2
2
ø23 2-M3 Depth: 8
Shaft cover
(only for -UL type)
(Calibration point position of Joints #3 and #4)
1mm flat cut
ø3, 90
°
conical hole
Max. ø11 through hole
ø16 h7 shaft diameter
ø30 mechanical stop
diameter
ø43
10
10
10
15
46 18
12
7
■
The flat cut and conical hole on the end of the shaft can be used for orienting Joint #4 by tightening a setscrew.
Summary of Contents for E2C Series
Page 1: ...SCARA ROBOT E2C series MANIPULATOR MANUAL Rev 6 EM069R1409F ...
Page 2: ...MANIPULATOR MANUAL E2C series Rev 6 ...
Page 8: ...vi E2C Rev 6 ...
Page 14: ......
Page 82: ......
Page 92: ...Maintenance 2 General Maintenance 80 E2C Rev 6 ...
Page 118: ...Maintenance 4 Replacing the Cable Unit 106 E2C Rev 6 ...
Page 194: ...Maintenance 11 Replacing the Signal Relay Board 182 E2C Rev 6 ...































































