





























Setup & Operation 3. Environments and Installation
E2C Rev.6
39
3.8.2 Relocating the Table Top Models
Follow the procedures described below when relocating the Manipulator.
(1) Turn OFF the power on all devices and unplug the cables.
Remove the mechanical stops if using them to limit the motion range of Joint #1 and
#2. For details on the motion range, refer to
Setup & Operation: 5.2 Motion Range
Setting by Mechanical Stops
.
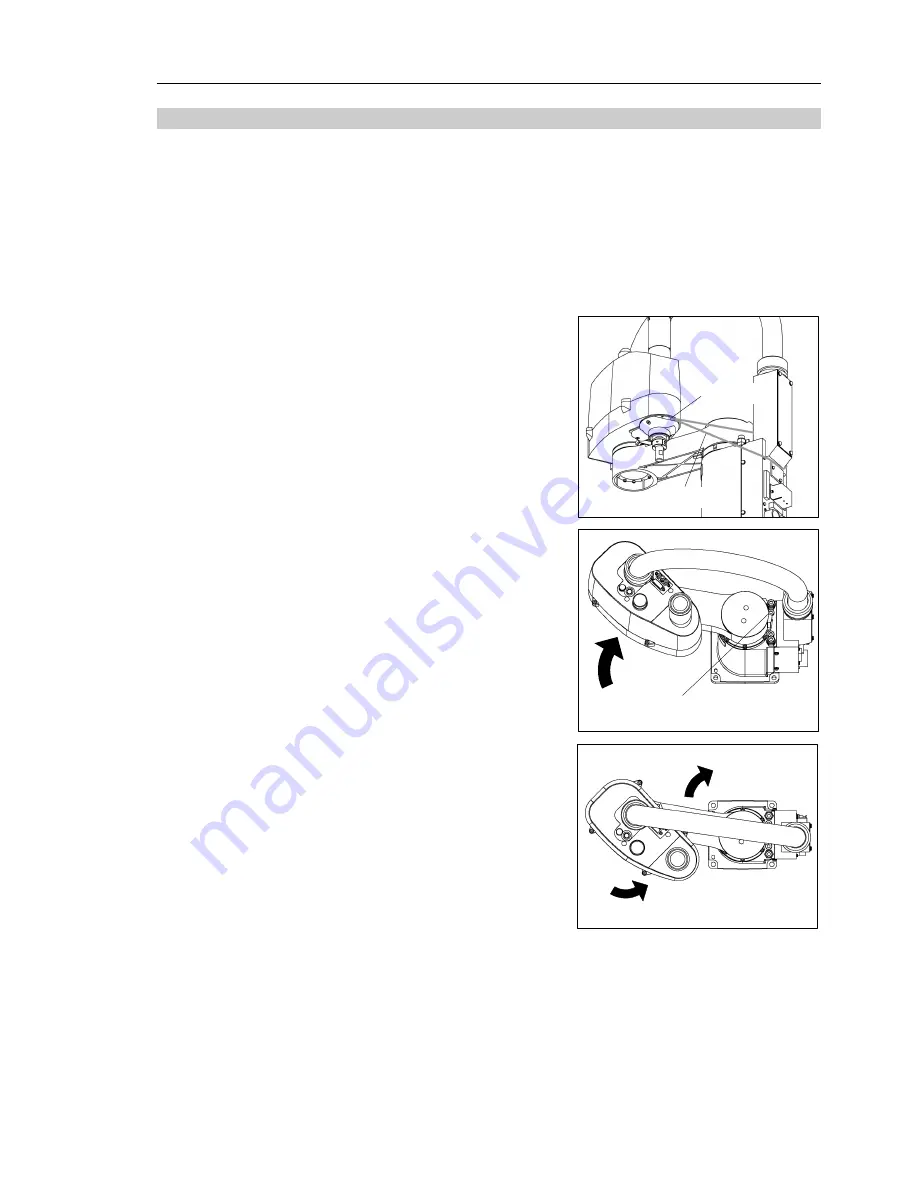
(2) Tighten the M4 screw on the bottom of
Arm #2’ end.
Wire tie
M4 screw
(3) Push Arm #1 by hand in the direction
shown with the arrow in the figure on the
right until the arm retaining bolt appears.
Turn the arm retaining bolt upward until
the part under the head of the bolt appears
by 15 mm.
Arm retaining bolt
M8
×
30
(4) Push Arms #1/#2 by hand in the direction
shown with the arrows in the figure on the
right until the arms touch the arm retaining
bolt and mechanical stop.
Arm #1
Arm #2
)
NOTE
Summary of Contents for E2C Series
Page 1: ...SCARA ROBOT E2C series MANIPULATOR MANUAL Rev 6 EM069R1409F ...
Page 2: ...MANIPULATOR MANUAL E2C series Rev 6 ...
Page 8: ...vi E2C Rev 6 ...
Page 14: ......
Page 82: ......
Page 92: ...Maintenance 2 General Maintenance 80 E2C Rev 6 ...
Page 118: ...Maintenance 4 Replacing the Cable Unit 106 E2C Rev 6 ...
Page 194: ...Maintenance 11 Replacing the Signal Relay Board 182 E2C Rev 6 ...







































































