




























Setup & Operation 5. Motion Range
E2C Rev.6
53
5. Motion Range
CAUTION
■
When setting up the motion range for safety, both the pulse range and
mechanical stops* must be always set at the same time.
*
For the Cleanroom-model Manipulator, the motion range set with the Joint #3
mechanical stop cannot be changed.
The motion range is preset at the factory as explained in
Setup & Operation: 5.4 Standard
Motion Range
. That is the maximum motion range of the Manipulator.
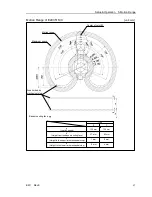
There are three methods for setting the motion range described as follows:
1. Setting by pulse range (for all joints)
2. Setting by mechanical stops
(for Joints #1 to #3 of Standard-model / Joints #1 and #2 of Cleanroom-model)
3. Setting the Cartesian (rectangular) range in the X, Y coordinate system of the
Manipulator (for Joints #1 and #2)
Mechanical
stop
Rectangular range setting
Pulse range
Motion range
Mechanical
stop
When the motion range is changed due to layout efficiency or safety, follow the
descriptions in
5.1
to
5.3
to set the range.
Summary of Contents for E2C Series
Page 1: ...SCARA ROBOT E2C series MANIPULATOR MANUAL Rev 6 EM069R1409F ...
Page 2: ...MANIPULATOR MANUAL E2C series Rev 6 ...
Page 8: ...vi E2C Rev 6 ...
Page 14: ......
Page 82: ......
Page 92: ...Maintenance 2 General Maintenance 80 E2C Rev 6 ...
Page 118: ...Maintenance 4 Replacing the Cable Unit 106 E2C Rev 6 ...
Page 194: ...Maintenance 11 Replacing the Signal Relay Board 182 E2C Rev 6 ...







































































