



























Setup & Operation 5. Motion Range
54
E2C Rev.6
5.
1
Motion Range Setting by Pulse Range (for All Joints)
Pulses are the basic unit of Manipulator motion. The motion range of the Manipulator is
controlled by the pulse range between the pulse lower limit and upper limit of each joint.
Pulse values are read from the encoder output of the servo motor.
For the maximum pulse range, refer to the following sections.
The pulse range must be set inside of the mechanical stop range.
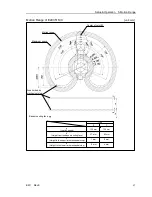
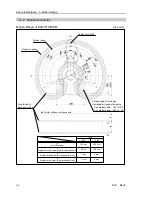
5.1.1 Max. Pulse Range of Joint #1
5.1.2 Max. Pulse Range of Joint #2
5.1.3 Max. Pulse Range of Joint #3
5.1.4 Max. Pulse Range of Joint #4.
Once the Manipulator receives an operating command, it checks whether the target
position specified by the command is within the pulse range before operating. If the
target position is out of the set pulse range, an error occurs and the Manipulator does not
move.
The method for setting pulse ranges varies with the software used.
SPEL CT
The pulse range can be set on the [RANGE] panel shown by selecting the [Setup]- [Robot
Parameters].
EPSON
RC+
EPSON RC+ 4.* or before
(
RC520/RC420
)
The pulse range can be set on the [RANGE] panel shown by selecting the [Project]-[Robot
Parameters].
You may also execute the RANGE command from the [EPSON RC+ Monitor Window].
EPSON RC+ 5.0 or later
(
RC
1
70
)
The pulse range can be set on the [Range] panel shown by selecting the [Tools]-[Robot
manager].
You may also execute the Range command from the [Command Window].
)
NOTE
Summary of Contents for E2C Series
Page 1: ...SCARA ROBOT E2C series MANIPULATOR MANUAL Rev 6 EM069R1409F ...
Page 2: ...MANIPULATOR MANUAL E2C series Rev 6 ...
Page 8: ...vi E2C Rev 6 ...
Page 14: ......
Page 82: ......
Page 92: ...Maintenance 2 General Maintenance 80 E2C Rev 6 ...
Page 118: ...Maintenance 4 Replacing the Cable Unit 106 E2C Rev 6 ...
Page 194: ...Maintenance 11 Replacing the Signal Relay Board 182 E2C Rev 6 ...




























































