





















E2C Rev.6
v
Before Reading This Manual
This section describes what you should know before reading this manual.
Structure of Control System
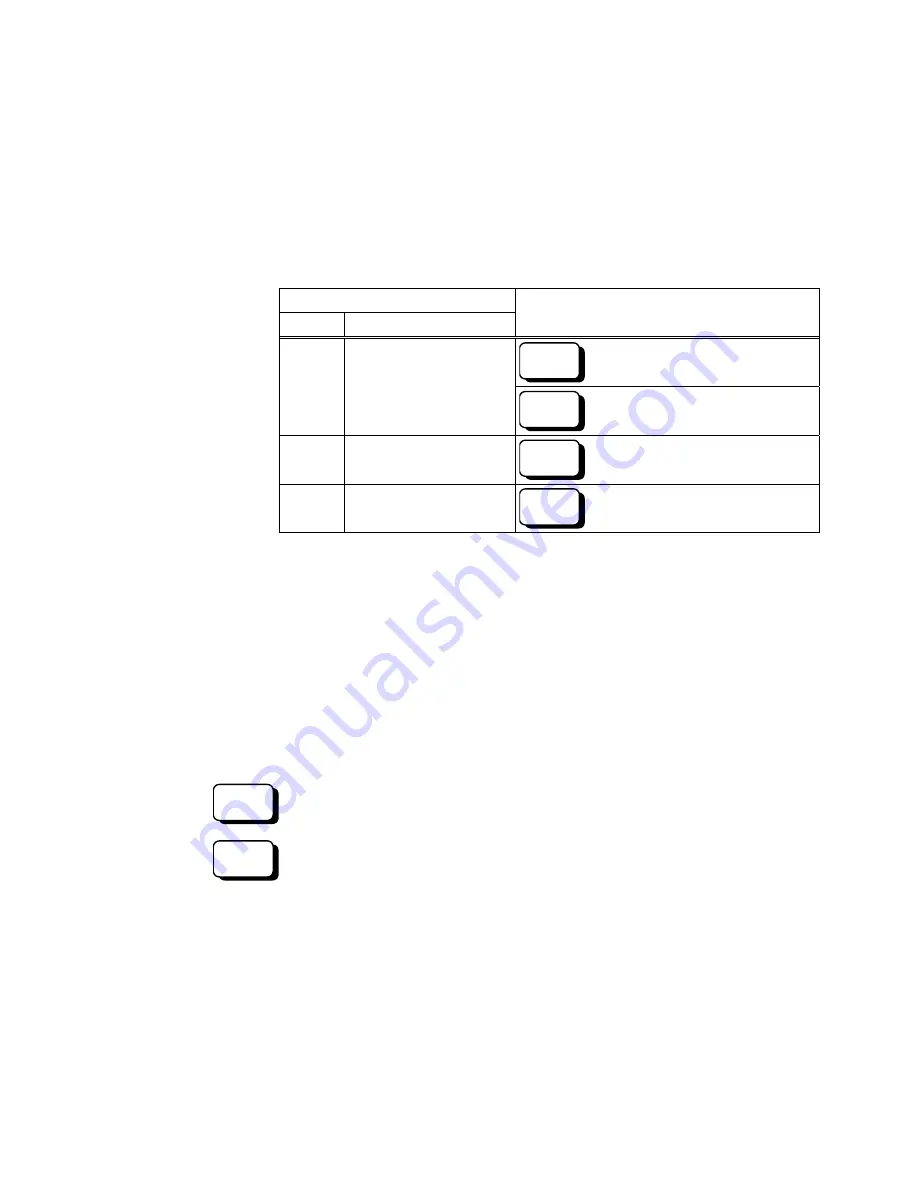
E2C Manipulators can be used with the following combinations of Controllers and software.
The operating methods and descriptions are different depending on which software you are
using. The following icons are put beside appropriate text as necessary. Use the
descriptions that pertain to the software you are using.
Controller
Type Composition
(Hardware)
Software
SPEL CT
SPEL CT
RC520
Control Unit
Drive Unit
EPSON
RC+
EPSON RC+ 4.* or before
RC420 Controller
EPSON
RC+
EPSON RC+ 4.* or before
RC170 Controller
EPSON
RC+
EPSON RC+ 5.0 or later
For details on commands, refer to User’s Guide or “On-line help”.
Turning ON/OFF Controller
When you see the instruction “Turn ON/OFF the Controller” in this manual, be sure to
turn ON/OFF all the hardware components. For the Controller composition, refer to the
table above.
Differences in Terminology according to Software
Some expressions are different according to software.
SPEL CT
For SPEL CT, a coordinate point including the arm pose is defined as “pose”. The data
is called “pose data”.
EPSON
RC+
For EPSON RC+, a coordinate point including the arm pose is defined as “point”.
The data is called “point data”.
Shape of Motors
The shape of the motors used for the Manipulator that you are using may be different from
the shape of the motors described in this manual because of the specifications.
Summary of Contents for E2C Series
Page 1: ...SCARA ROBOT E2C series MANIPULATOR MANUAL Rev 6 EM069R1409F ...
Page 2: ...MANIPULATOR MANUAL E2C series Rev 6 ...
Page 8: ...vi E2C Rev 6 ...
Page 14: ......
Page 82: ......
Page 92: ...Maintenance 2 General Maintenance 80 E2C Rev 6 ...
Page 118: ...Maintenance 4 Replacing the Cable Unit 106 E2C Rev 6 ...
Page 194: ...Maintenance 11 Replacing the Signal Relay Board 182 E2C Rev 6 ...







































































