





























Maintenance 2. General Maintenance
100
G10 / G20 Rev.20
2.4 Tightening Hexagon Socket Head Cap Bolts
Hexagon socket head cap bolts are used in places where mechanical strength is required.
(A hexagon socket head cap bolt will be called a “bolt” in this manual.) These bolts are
fastened with the tightening torques shown in the following table.
When it is necessary to refasten these bolts in some procedures in this manual (except
special cases as noted), use a torque wrench so that the bolts are fastened with the
appropriate tightening torques as shown below.
Bolt
Tightening Torque
Refer below for the set screw.
M3
2.0 ± 0.1 N
⋅
m (21 ± 1 kgf
⋅
cm)
Set Screw
Tightening Torque
M4
4.0 ± 0.2 N
⋅
m (41 ± 2 kgf
⋅
cm)
M4
2.4 ± 0.1 N
⋅
m (26 ± 1 kgf
⋅
cm)
M5
8.0 ± 0.4 N
⋅
m (82 ± 4 kgf
⋅
cm)
M5
3.9 ± 0.2 N
⋅
m (40 ± 2 kgf
⋅
cm)
M6
13.0 ± 0.6 N
⋅
m (133 ± 6 kgf
⋅
cm)
M8
32.0 ± 1.6 N
⋅
m (326 ± 16 kgf
⋅
cm)
M10
58.0 ± 2.9 N
⋅
m (590 ± 30 kgf
⋅
cm)
M12 100.0 ± 5.0 N
⋅
m (1,020 ± 51 kgf
⋅
cm)
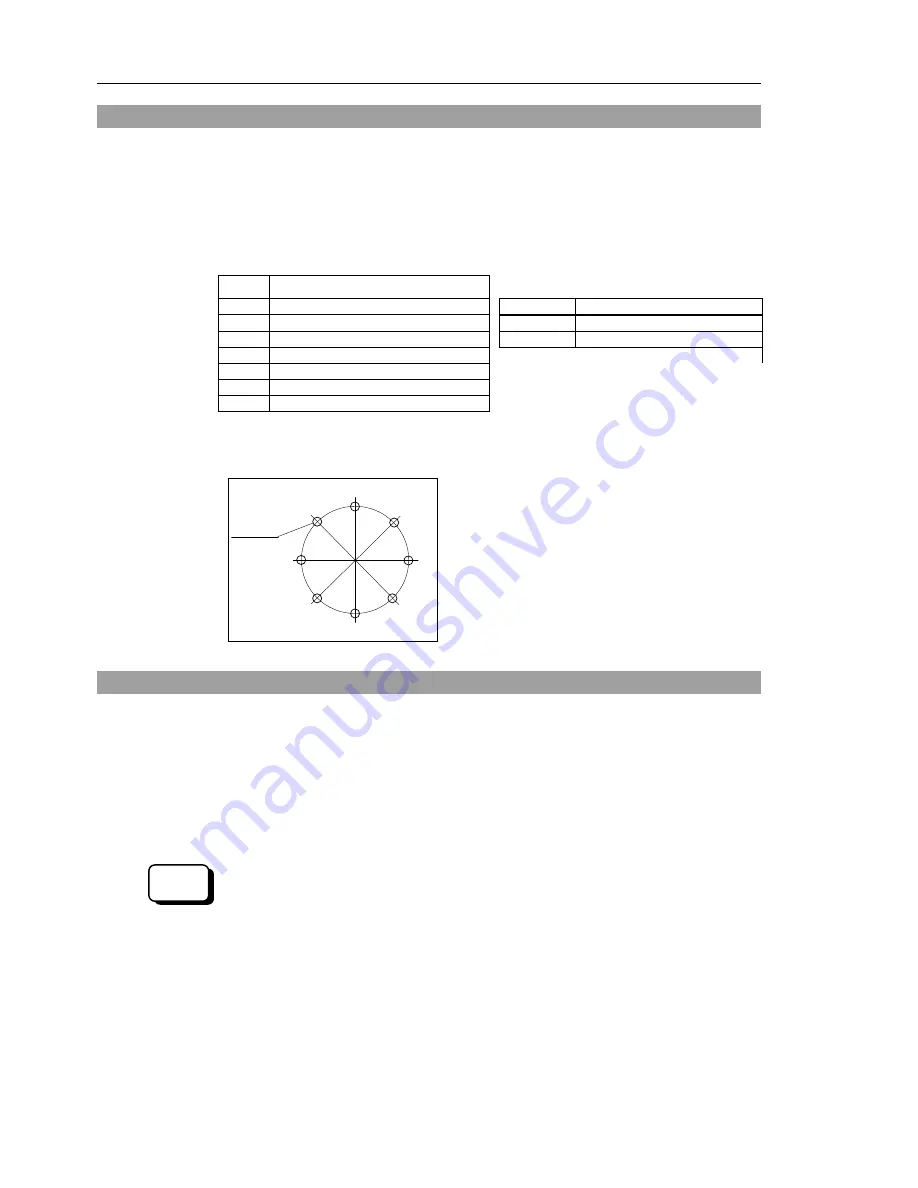
We recommend that the bolts aligned on a circumference should be fastened in a crisscross
pattern as shown in the figure below.
1
5
3
7
2
6
4
8
Bolt hole
Do not fasten all bolts securely at one time.
Divide the number of times that the bolts are
fastened into two or three and fasten the bolts
securely with a hexagonal wrench. Then, use a
torque wrench so that the bolts are fastened with
tightening torques shown in the table above.
2.5 Matching Origins
After parts have been replaced (motors, reduction gear units, a brake, timing belts, a ball
screw spline unit, etc.), the Manipulator cannot operate properly because a mismatch
exists between the origin stored in each motor and its corresponding origin stored in the
Controller. After replacing the parts, it is necessary to match these origins.
For calibration, the pulse values for a specific position must be recorded in advance.
Before replacing parts, select easy point (pose) data from the registered point data to check
the accuracy. Then, follow the steps below to display the pulse values and record them.
EPSON
RC+
Execute the following command from the [Command Window].
>PULSE
PULSE:
[Joint #1 Pulse value]
pls
[Joint #2 Pulse value]
pls
[Joint #3 Pulse value]
pls
[Joint #4 Pulse value]
pls
Summary of Contents for G10 Series
Page 1: ...Rev 20 EM183R3619F SCARA ROBOT G10 G20 series MANIPULATOR MANUAL ...
Page 2: ...MANIPULATOR MANUAL G10 G20 series Rev 20 ...
Page 8: ...vi G10 G20 Rev 20 ...
Page 14: ......
Page 102: ...Setup Operation 5 Motion Range 90 G10 G20 Rev 20 ...
Page 104: ......




































































