



























Maintenance 5. Arm #1
G10 / G20 Rev.20
143
Joint #1
reduction gear
unit
Removal
(1) Execute the removal steps from (1) to (5) in
Maintenance: 5.1 Replacing Joint #1
Motor
and remove the waveform generator.
(2) Remove the arm cap on the base side.
For details, refer to
Maintenance: 3.3 Arm #1 Cover
.
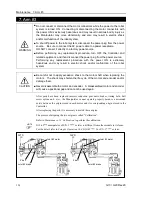
(3) Turn the Manipulator laterally.
CAUTION
■
When turning the Manipulator laterally, there must be two or more people to work
on it so that at least one of them can support the arm while others are removing
the bolts. Removing the bolts without supporting the arm may result in the arm
falling, bodily injury, and/or malfunction of the robot system.
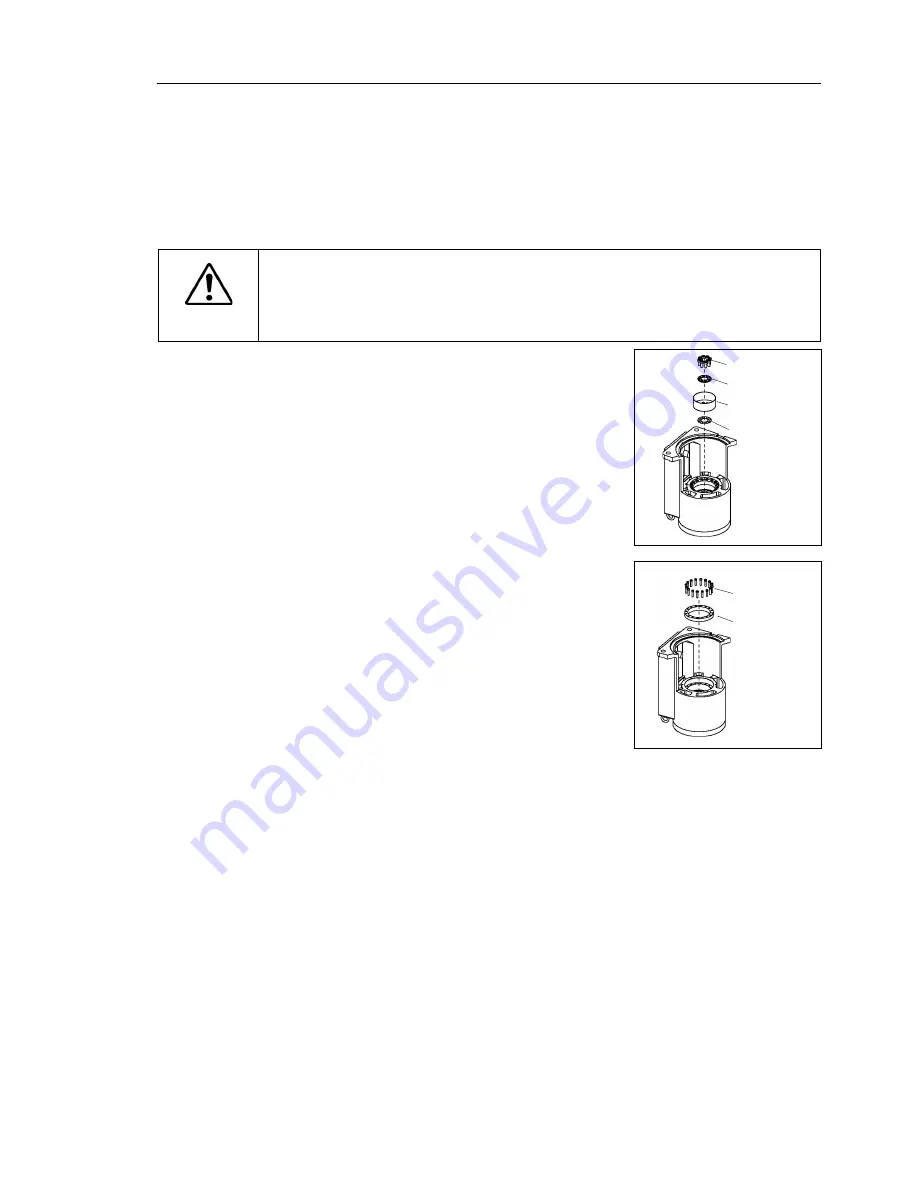
(4) Use the extracting M5 screws and remove the spacer,
flexspline and the grip ring.
Flexspline
8-M8
×
20
Spacer
Grip ring
(5) Remove the circular spline from the base.
Circular
spline
16-M5
×
25
Summary of Contents for G10 Series
Page 1: ...Rev 20 EM183R3619F SCARA ROBOT G10 G20 series MANIPULATOR MANUAL ...
Page 2: ...MANIPULATOR MANUAL G10 G20 series Rev 20 ...
Page 8: ...vi G10 G20 Rev 20 ...
Page 14: ......
Page 102: ...Setup Operation 5 Motion Range 90 G10 G20 Rev 20 ...
Page 104: ......
































































