





























Maintenance 6. Arm #2
150
G10 / G20 Rev.20
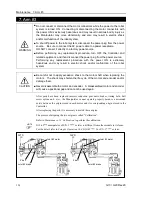
(6) Mount the spring plate.
2-M4
×
8
Spring
plate
G10
G20
(7) Connect the connectors X221, X21, and X62.
(8) Re-bundle the cables in their original positions
with a wire tie removed in the removal procedure
step (5).
Do not allow unnecessary strain on the cables.
(9) Mount the arm top cover.
For details, refer to
Maintenance: 3.1 Arm Top Cover
.
(10) Perform the calibration of Joint #2.
For details, refer to
Maintenance: 14. Calibration.
Summary of Contents for G10 Series
Page 1: ...Rev 20 EM183R3619F SCARA ROBOT G10 G20 series MANIPULATOR MANUAL ...
Page 2: ...MANIPULATOR MANUAL G10 G20 series Rev 20 ...
Page 8: ...vi G10 G20 Rev 20 ...
Page 14: ......
Page 102: ...Setup Operation 5 Motion Range 90 G10 G20 Rev 20 ...
Page 104: ......







































































