



























Setup & Operation 4. Setting of End Effectors
G10 / G20 Rev.20
63
4. Setting of End Effectors
4.1 Attaching an End Effector
Users are responsible for making their own end effector(s). Before attaching an end
effector, observe these guidelines.
CAUTION
■
If you use an end effector equipped with a gripper or chuck, connect wires and/or
pneumatic tubes properly so that the gripper does not release the work piece
when the power to the robot system is turned OFF. Improper connection of the
wires and/or pneumatic tubes may damage the robot system and/or work piece
as the work piece is released when the Emergency Stop switch is pressed.
I/O outputs are configured at the factory so that they are automatically shut off (0)
by power disconnection, the Emergency Stop switch, or the safety features of the
robot system.
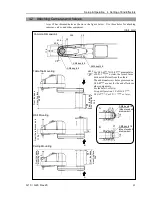
Shaft
- Attach an end effector to the lower end of the shaft.
For the shaft dimensions, and the overall dimensions of the Manipulator, refer to
Setup
& Operation: 2. Specifications
.
- Do not move the upper limit mechanical stop on the lower side of the shaft.
Otherwise, when “Jump motion” is performed, the upper limit mechanical stop may hit
the Manipulator, and the robot system may not function properly.
- Use a split muff coupling with an M4 bolt or larger to attach the end effector to the
shaft.
Brake release switch
- Joints #3 and #4 cannot be moved up/down by hand because the electromagnetic brake
is applied to the joints while power to the robot system is turned OFF. This prevents
the shaft from hitting peripheral equipment and rotating in the case that the shaft is
lowered by the weight of the end effector when the power is disconnected during
operation, or when the motor is turned OFF even though the power is turned ON.
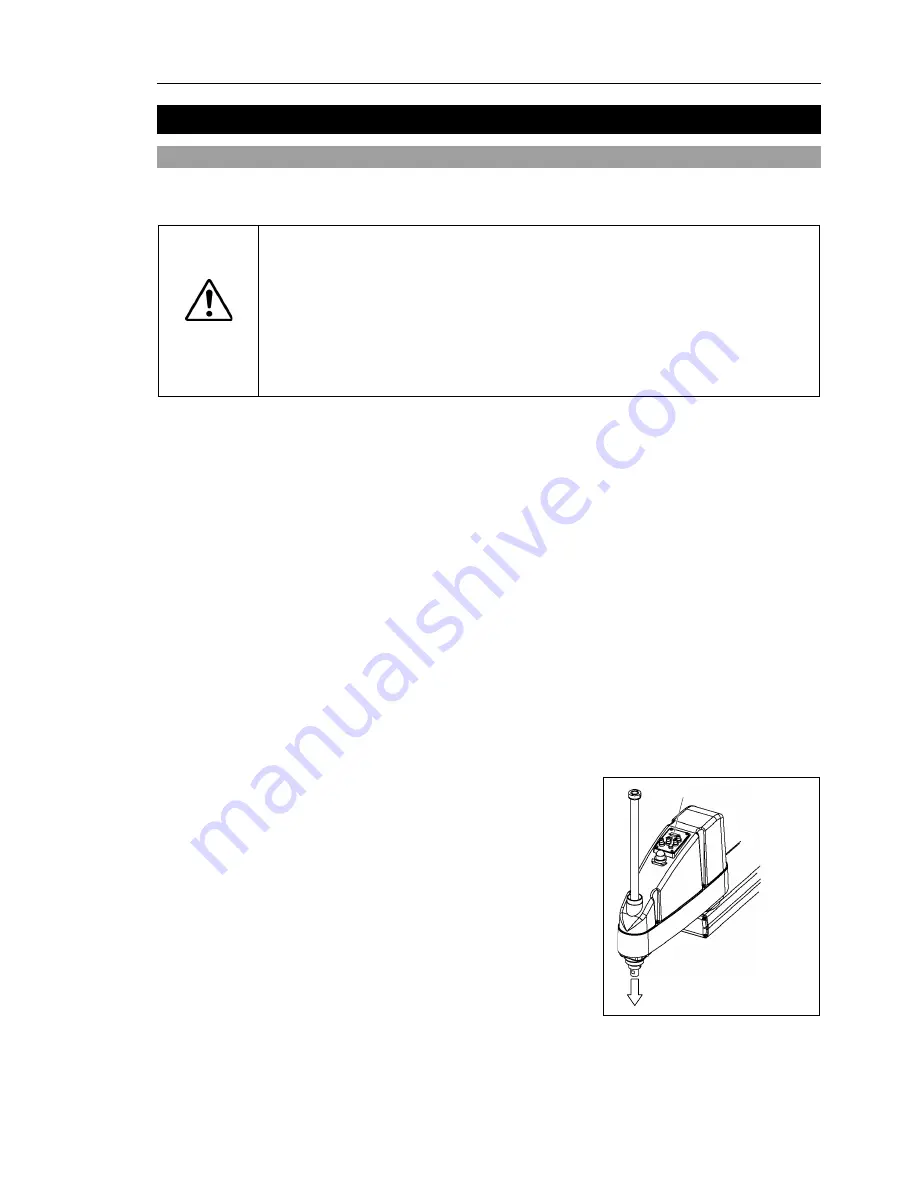
To move Joint #3 up/down or rotate Joint #4
while attaching an end effector, turn ON the
Controller and move the joint up/down or rotate
the joint while pressing the brake release switch.
This button switch is a momentary-type; the
brake is released only while the button switch is
being pressed.
The respective brakes for Joints #3 and #4 are
released simultaneously.
Brake release switch
The shaft may be lowered
by the weight of the end
effector.
- Be careful of the shaft falling and rotating while the brake release switch is being
pressed because the shaft may be lowered by the weight of the end effector.
Summary of Contents for G10 Series
Page 1: ...Rev 20 EM183R3619F SCARA ROBOT G10 G20 series MANIPULATOR MANUAL ...
Page 2: ...MANIPULATOR MANUAL G10 G20 series Rev 20 ...
Page 8: ...vi G10 G20 Rev 20 ...
Page 14: ......
Page 102: ...Setup Operation 5 Motion Range 90 G10 G20 Rev 20 ...
Page 104: ......
































































