





























Maintenance 8. Arm #4
G3 Rev.14
143
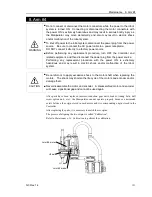
(6) Apply the proper tension to the U1 belt, and
then secure the Joint #4 intermediate shaft unit.
Pass a suitable cord or string around the Joint #4
motor unit near its mounting plate.
Then, pull the cord using a force gauge or
similar tool to apply the specified tension shown
in the figure on the right.
3-M4
×
12
+ washer
U1 belt tension = 7.5
±
0.5 kgf
Force gauge
Joint #4
motor unit
(7) Connect the connector.
Connector: X241, X41
(8) Re-bundle the cables in their original positions with a wire tie removed in step (9).
(9) Connect the backup connectors of Joint #4, X64 to the battery board.
Bundle the cables with wire tie to prevent the backup cable connectors from falling off
by mistake.
(10) Mount the battery board to Arm #2.
2-M4
×
5
Battery board
2-M4
×
12
(11) Mount the user plate and ground wire to Arm #2.
(12) Install the arm top cover and arm bottom cover.
For details, refer to
Maintenance: 3. Covers
.
(13) Perform the calibration of Joint #4.
For details, refer to
Maintenance: 14. Calibration
.
Summary of Contents for G3 Series
Page 1: ...Rev 14 EM183R3623F SCARA ROBOT G3 series MANIPULATOR MANUAL ...
Page 2: ...MANIPULATOR MANUAL G3 series Rev 14 ...
Page 8: ...vi G3 Rev 14 ...
Page 14: ......
Page 84: ...Setup Operation 5 Motion Range 72 G3 Rev 14 ...
Page 86: ...74 ...
Page 200: ...Maintenance 15 Maintenance Parts List 188 G3 Rev 14 ...







































































