





























Setup & Operation 5. Motion Range
G6 Rev.21
69
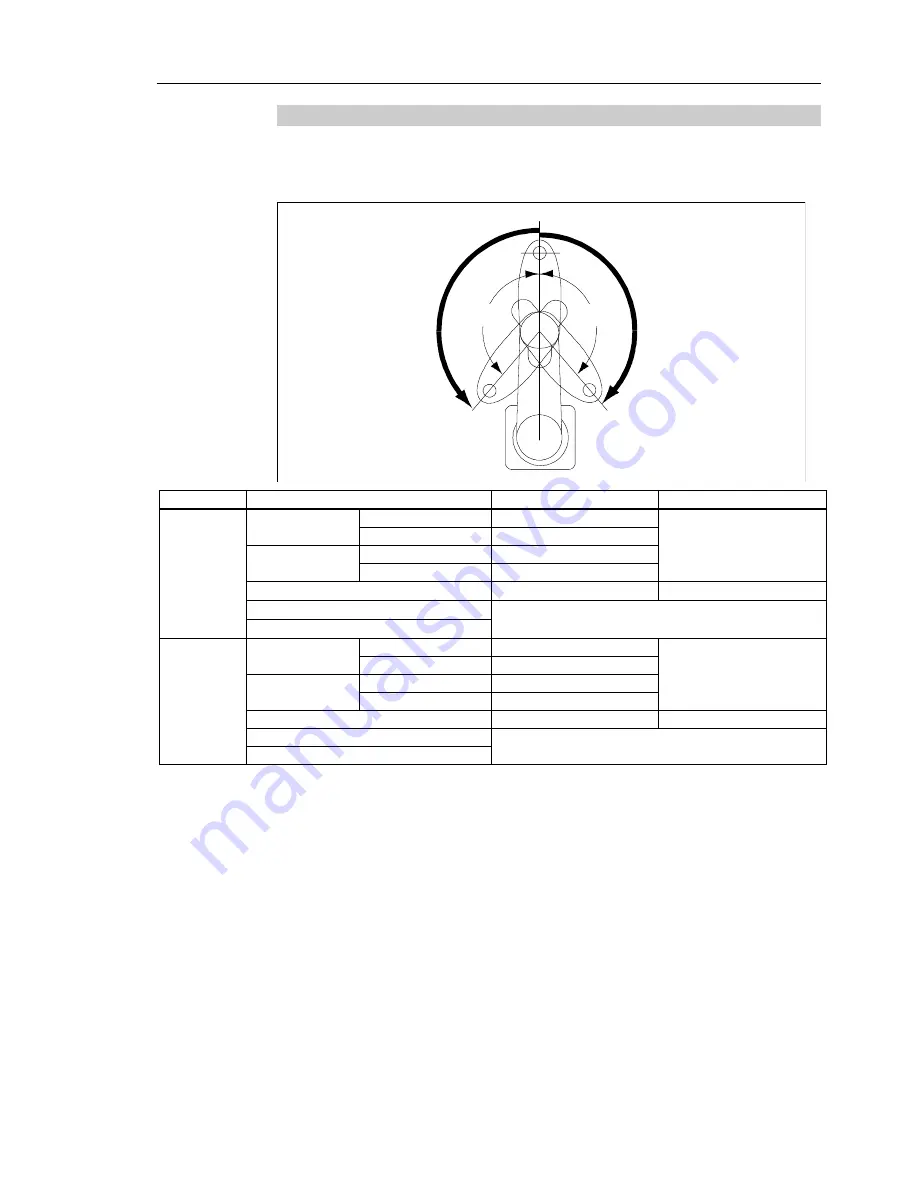
5.1.2 Max. Pulse Range of Joint #2
The 0 (zero) pulse position of Joint #2 is the position where Arm #2 is in-line with Arm #1.
With the 0 pulse as a starting point, the counterclockwise pulse value is defined as the
positive (+) and the clockwise pulse value is defined as the negative (
-
).
- B
+ B
0 pulse
- A
+ A
Model
Table Top Mounting
Ceiling, Wall Mountings
A
Max. Motion
Range
G6-45*S*, D*
Z : 0 to –270 mm
±
147.5 degrees
±
130 degrees
Z : –270 to –330 mm
±
145 degrees
G6-45*C*, P*,
D* bellows
Z : 0 to –240 mm
±
147.5 degrees
Z : –240 to –300 mm
±
142 degrees
G6-55*C*, P*, D* bellows
±
147.5 degrees
±
145 degrees
G6-55*S*, D*
±
147.5 degrees
G6-65***
B
Max. Pulse
Range
G6-45*S*, D*
Z : 0 to –270 mm
±
2685156
±
2366578
Z : –270 to –330 mm
±
2369645
G6-45*C*, P*,
D* bellows
Z : 0 to –240 mm
±
2685156
Z : –240 to –300 mm
±
2585031
G6-55*C*, P*, D* bellows
±
2685156
±
2639645
G6-55*S*, D*
±
2685156
G6-65***
The bellows for G6-***D are options at shipment.
In the range Z: 0 to –270 mm, the area is limited by interference of the Manipulator body and the
arm.
NOTE
Summary of Contents for G6 series
Page 1: ...Rev 21 EM183R3621F SCARA ROBOT G6 series MANIPULATOR MANUAL ...
Page 2: ...MANIPULATOR MANUAL G6 series Rev 21 ...
Page 8: ...vi G6 Rev 21 ...
Page 14: ......
Page 94: ......
Page 216: ...Maintenance 14 Maintenance Parts List 204 G6 Rev 21 ...


































































