





















Setup & Operation 2. Specifications
16
LS20 Rev.4
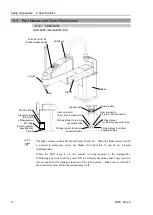
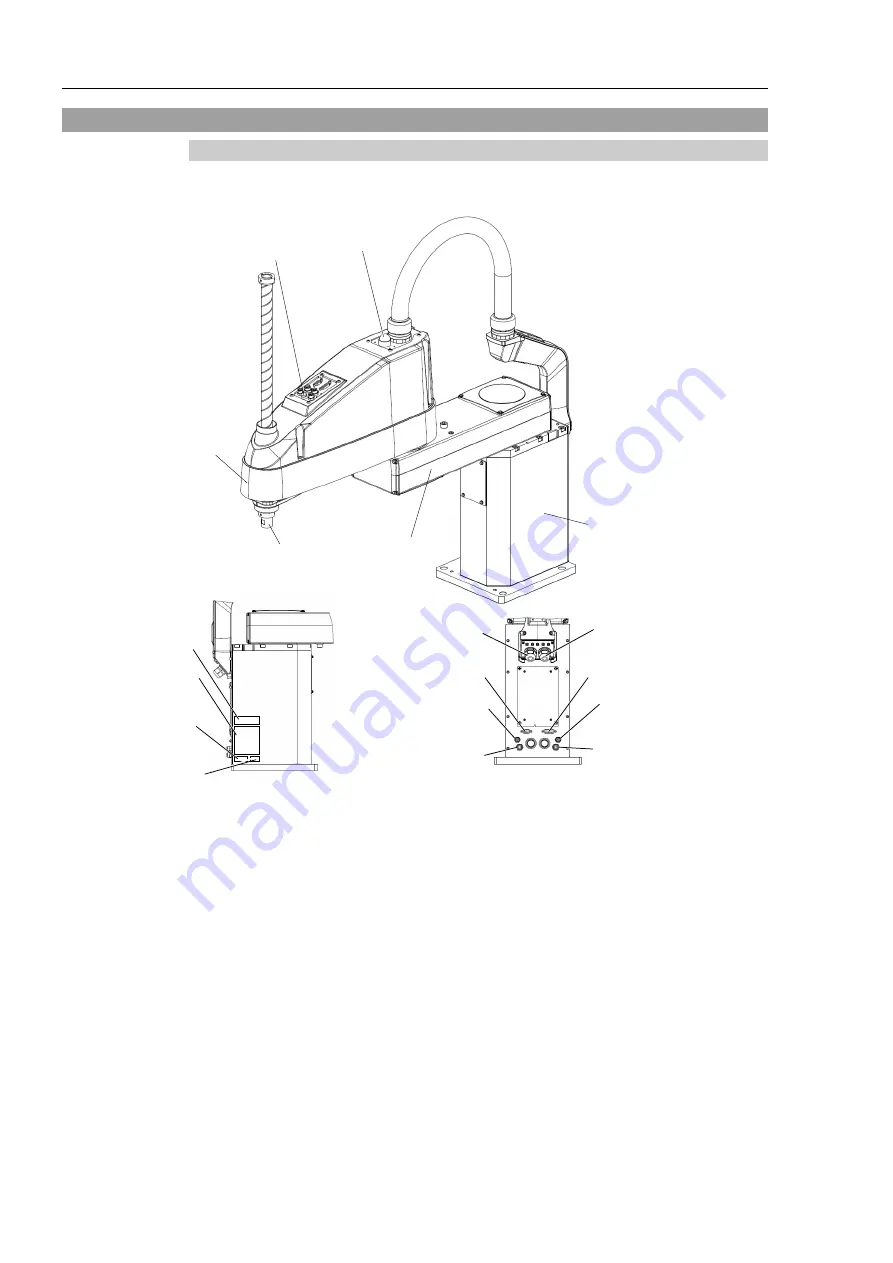
2.3 Part Names and Outer Dimensions
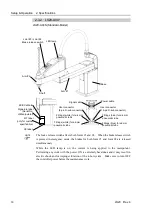
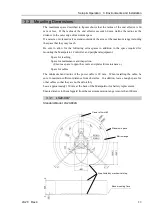
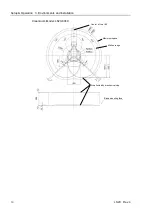
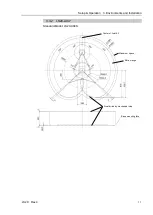
2.3.1 LS20-804*
LS20-804S (Standard-Model)
Joint #3 / Joint #4
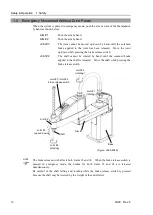
Brake release switch
Arm #1
Arm #2
Base
Shaft
MT label
(only for custom
specification)
Signature label
(Serial No.
of Manipulator)
Signal cable
Power cable
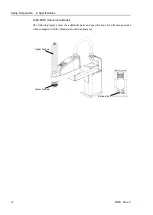
Fittings (blue)
for ø4 mm pneumatic tube
Fittings (blue) for ø6 mm
pneumatic tube
Fittings (white) for ø6 mm
pneumatic tube
User connector
(15-pin D-sub connector)
LED lamp
CE label
User connector
(9-pin D-sub connector)
Fittings (white) for ø4 mm
pneumatic tube
KC/KCs Mark
- The brake release switch affects both Joints #3 and #4. When the brake release switch
is pressed in emergency mode, the brakes for both Joints #3 and #4 are released
simultaneously.
- While the LED lamp is on, the current is being applied to the manipulator.
Performing any work with the power ON is extremely hazardous and it may result in
electric shock and/or improper function of the robot system. Make sure to turn OFF
the controller power before the maintenance work.
NOTE
Summary of Contents for LS20
Page 1: ...Rev 4 EM179R3533F SCARA ROBOT LS20 series MANIPULATOR MANUAL ...
Page 2: ...MANIPULATOR MANUAL LS20 series Rev 4 ...
Page 8: ...vi LS20 Rev 4 ...
Page 12: ...TABLE OF CONTENTS x LS20 Rev 4 ...
Page 14: ......
Page 29: ...Setup Operation 2 Specifications LS20 Rev 4 17 LS20 804S Standard Model ...
Page 31: ...Setup Operation 2 Specifications LS20 Rev 4 19 LS20 804C Cleanroom Model ...
Page 33: ...Setup Operation 2 Specifications LS20 Rev 4 21 LS20 A04S Standard Model ...
Page 35: ...Setup Operation 2 Specifications LS20 Rev 4 23 LS20 A04C Cleanroom Model ...
Page 72: ......
Page 92: ...Maintenance 4 Cable 80 LS20 Rev 4 4 2 Wiring Diagrams 4 2 1 Signal Cable ...
Page 176: ...Maintenance 14 Maintenance Parts List 164 LS20 Rev 4 ...







































































