





























Maintenance 4. Cable
206
N6 Rev.2
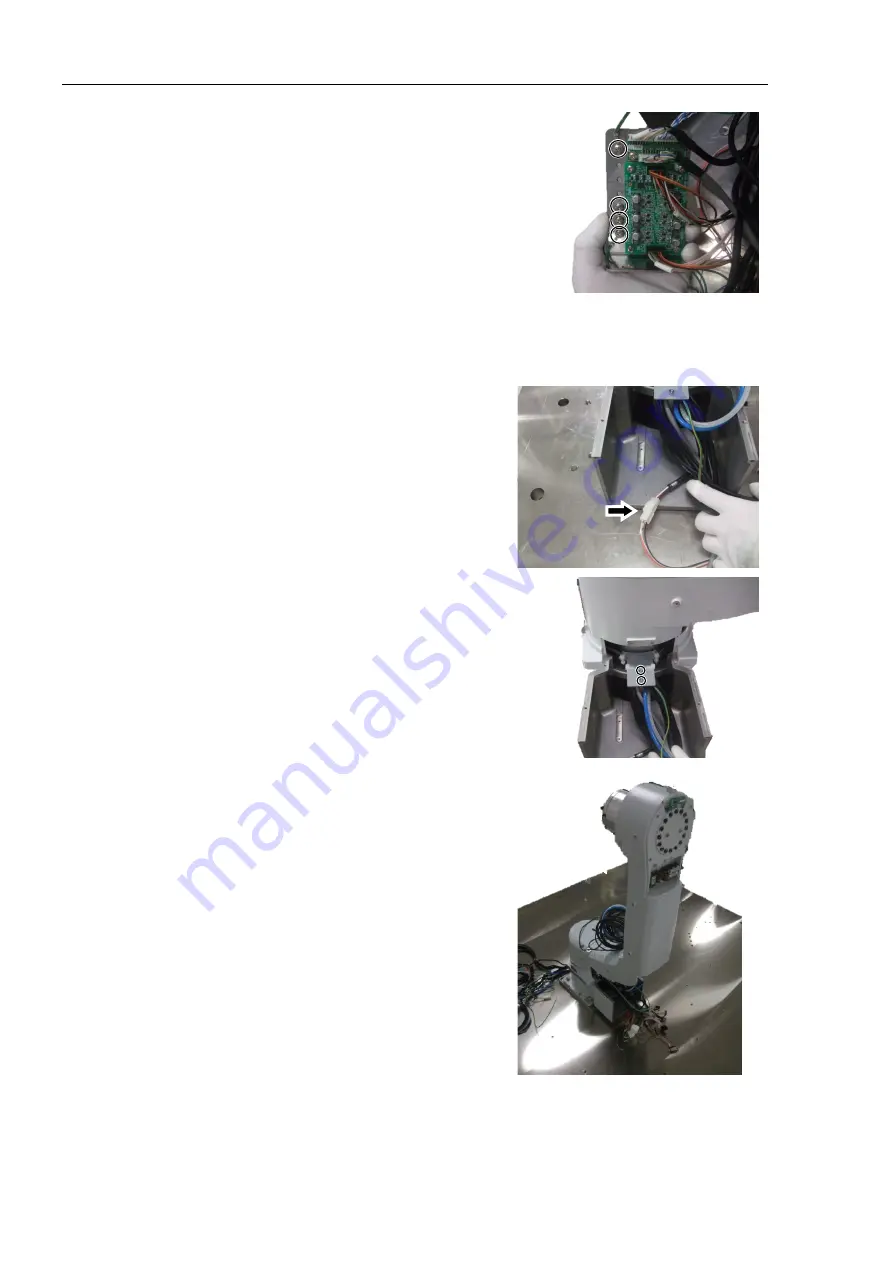
(54) Disconnect the connectors connected to the
encoder board 1 and the brake board.
Connectors:
EB01_CN1, EB01_CN3, EB0x_CN2
BRK_CN1, BRK_CN2
Be careful that the jumper pins on the board
do not come off.
(55) Remove the four ground wire terminals fixed on the board fixing plate.
Cross recessed binding head machine screws: 4-M4×8
(56) Disconnect the connector connected to the
Joint #1 actuator unit.
Connector: PW1
(57) Remove the J1 cable fixing plate fixed on
the base.
Hexagon socket head cap bolts: 2-M4
×
8
(58) Rotate the Arm #1 to the origin position.
NOTE
Summary of Contents for N6 Series
Page 1: ...Rev 2 EM187R3735F 6 Axis Robots N6 series MANIPULATOR MANUAL ...
Page 2: ...Manipulator manual N6 series Rev 2 ...
Page 8: ...vi N6 Rev 2 ...
Page 14: ......
Page 27: ...Setup Operation 1 Safety N6 Rev 2 15 N6 A850 R C A D F G F E H G F B G F G F F F N6 A850 BR F ...
Page 34: ...Setup Operation 2 Specifications 22 N6 Rev 2 N6 A850 BR Cable direction Upward ...
Page 52: ...Setup Operation 3 Environment and Installation 40 N6 Rev 2 N6 A850 R Maximum motion range 802 ...
Page 66: ...Setup Operation 4 End Effectors 54 N6 Rev 2 N6 A850 R Unit mm ...
Page 104: ......
Page 274: ...Maintenance 4 Cable 262 N6 Rev 2 4 7 1 Signal Power cable ...
Page 275: ...Maintenance 4 Cable N6 Rev 2 263 ...
Page 276: ...Maintenance 4 Cable 264 N6 Rev 2 4 7 2 User Cable ...







































































