




























Setup & Operation 5. Motion Range
N6 Rev.2
67
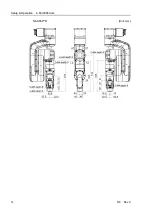
Joint #3 (N6-A1000**)
When viewing from the arrow on the right figure, pulse values in counterclockwise
direction are positive (+) and values in clockwise direction are negative (
-
).
Arm #3
0 pulse position
−
direction
+ direction
+ direction
−
direction
Angle (deg.) : ±180
Pulse (pulse) : ±5308416
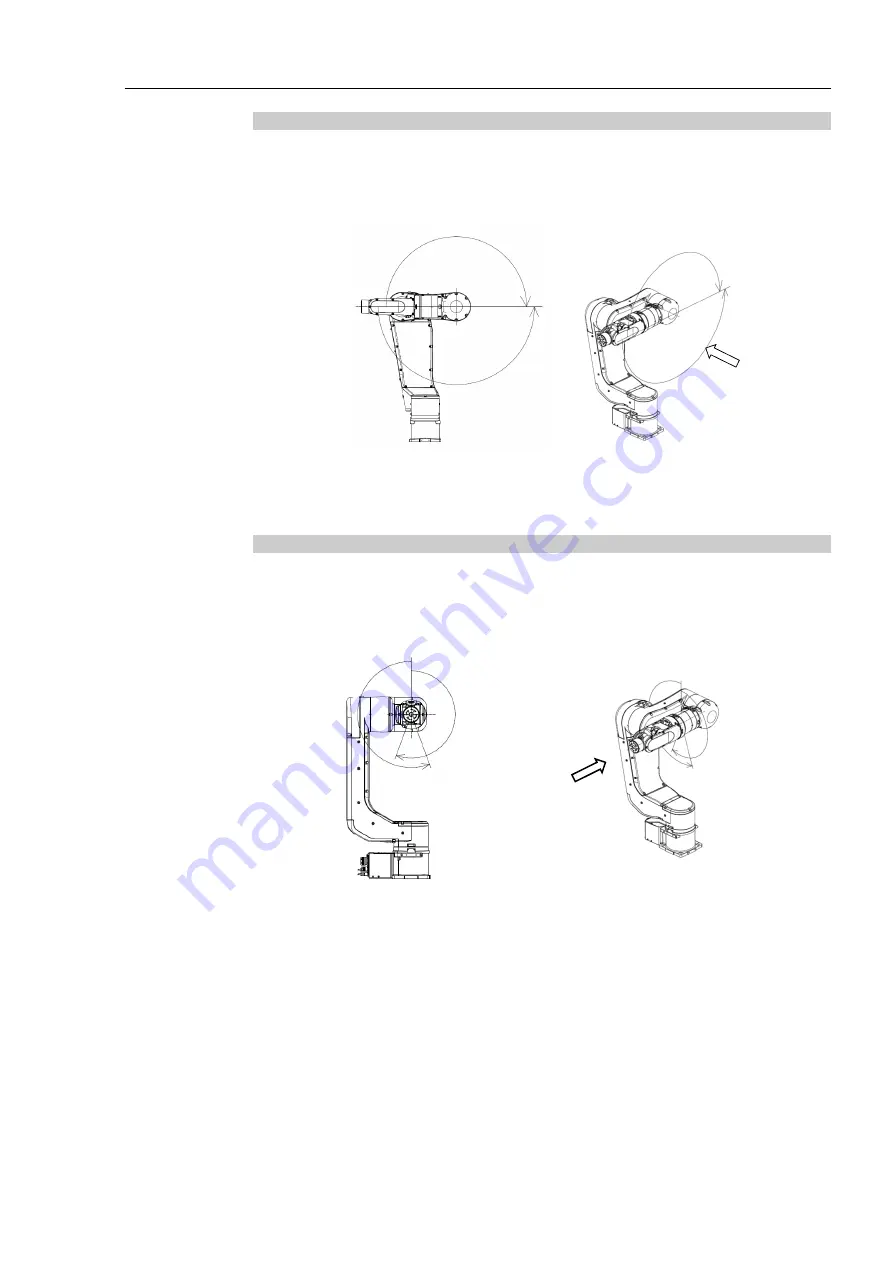
Joint #4 (N6-A1000**)
When viewing from the arrow on the right figure, pulse values in counterclockwise
direction are positive (+) and values in clockwise direction are negative (
-
).
Arm #4
0 pulse position
+ direction
−
direction
−
direction
+ direction
Angle (deg.) : ±200
Pulse (pulse) : ±5898240
Summary of Contents for N6 Series
Page 1: ...Rev 2 EM187R3735F 6 Axis Robots N6 series MANIPULATOR MANUAL ...
Page 2: ...Manipulator manual N6 series Rev 2 ...
Page 8: ...vi N6 Rev 2 ...
Page 14: ......
Page 27: ...Setup Operation 1 Safety N6 Rev 2 15 N6 A850 R C A D F G F E H G F B G F G F F F N6 A850 BR F ...
Page 34: ...Setup Operation 2 Specifications 22 N6 Rev 2 N6 A850 BR Cable direction Upward ...
Page 52: ...Setup Operation 3 Environment and Installation 40 N6 Rev 2 N6 A850 R Maximum motion range 802 ...
Page 66: ...Setup Operation 4 End Effectors 54 N6 Rev 2 N6 A850 R Unit mm ...
Page 104: ......
Page 274: ...Maintenance 4 Cable 262 N6 Rev 2 4 7 1 Signal Power cable ...
Page 275: ...Maintenance 4 Cable N6 Rev 2 263 ...
Page 276: ...Maintenance 4 Cable 264 N6 Rev 2 4 7 2 User Cable ...







































































