



























Setup & Operation 5.1 Safety Door Switch and Latch Release Switch (EMERGENCY Connector)
RC420 Rev.9
33
5. EMERGENCY Connector
The details of safety requirements for this section are described in the
Safety
chapter in
User’s Guide. Please refer to them to keep the robot system safe.
5.1 Safety Door Switch and Latch Release Switch
The EMERGENCY connector has input terminals for the Safety Door switch and the
Emergency Stop switch. Be sure to use these input terminals to keep the system safe.
Use only the connector that comes as a standard accessory.
Connector Standard
EMERGENCY connector
Rectangular, half-pitch, M2.6 screw
5.1.1 Safety Door Switch
WARNING
■
The interlock of the Safety Door must be functioning when the robot system is
operated. Do not operate the system under the condition that the switch
cannot be turned ON/OFF (e.g. The tape is put around the switch.). Operating
the robot system when the switch is not functioning properly is extremely
hazardous and may cause serious safety problems as the Safety Door input
cannot fulfill its intended function.
In order to maintain a safe working zone, a safeguard must be erected around the
Manipulator. The safeguard must have an interlock switch at the entrance to the
working zoon. The Safety Door that is described in this manual is one of the safeguards
and an interlock of the Safety Door is called a Safety Door switch. Connect the Safety
Door switch to the Safety Door input terminal on the EMERGENCY connector.
The Safety Door switch has safety features such as temporary hold-up of the program or
the operation-prohibited status that are activated whenever the Safety Door is opened.
Observe the following in designing the Safety Door switch and the Safety Door.
- For the Safety Door switch, select a switch that opens as the Safety Door opens, and
not by the spring of the switch itself.
- The signal from the Safety Door (Safety Door input) is designed to input to two
redundant signals. If the signals at the two inputs differ by two seconds or more, the
system recognizes it to be a critical error. Therefore, make sure that the Safety Door
switch has two separate redundant circuits and that each connects to the specified pins
at the EMERGENCY connector on the Controller.
- The Safety Door must be designed and installed so that it does not close accidentally.
)
NOTE
Summary of Contents for RC420
Page 1: ...Rev 9 EM073C1492F ROBOT CONTROLLER RC420 ...
Page 2: ...ROBOT CONTROLLER RC420 Rev 9 ...
Page 12: ...Setup Operation ...
Page 20: ...Setup Operation 1 Safety 10 RC420 Rev 9 ...
Page 30: ...Setup Operation 2 3 Controller Part Names and Functions 20 RC420 Rev 9 ...
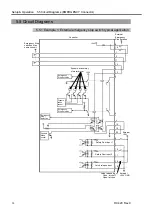
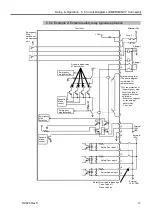
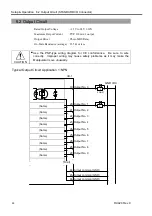
Page 50: ...Setup Operation 5 5 Circuit Diagrams EMERGENCY Connector 40 RC420 Rev 9 ...
Page 58: ...Setup Operation 6 3 Pin Assignments STANDARD I O Connector 48 RC420 Rev 9 ...
Page 114: ...Setup Operation 10 UPS Uninterruptible Power Supply 104 RC420 Rev 9 ...
Page 115: ...97 Maintenance This manual contains maintenance procedures for the RC420 Robot Controller ...
Page 116: ...Maintenance RC420 Rev 9 106 ...
Page 138: ...Maintenance 6 Motor Driver Module 128 RC420 Rev 9 ...
Page 170: ...Maintenance 12 Recovering the HDD 160 RC420 Rev 9 ...







































































