





























Installation 2. Installation
16
RC700-D Rev.2
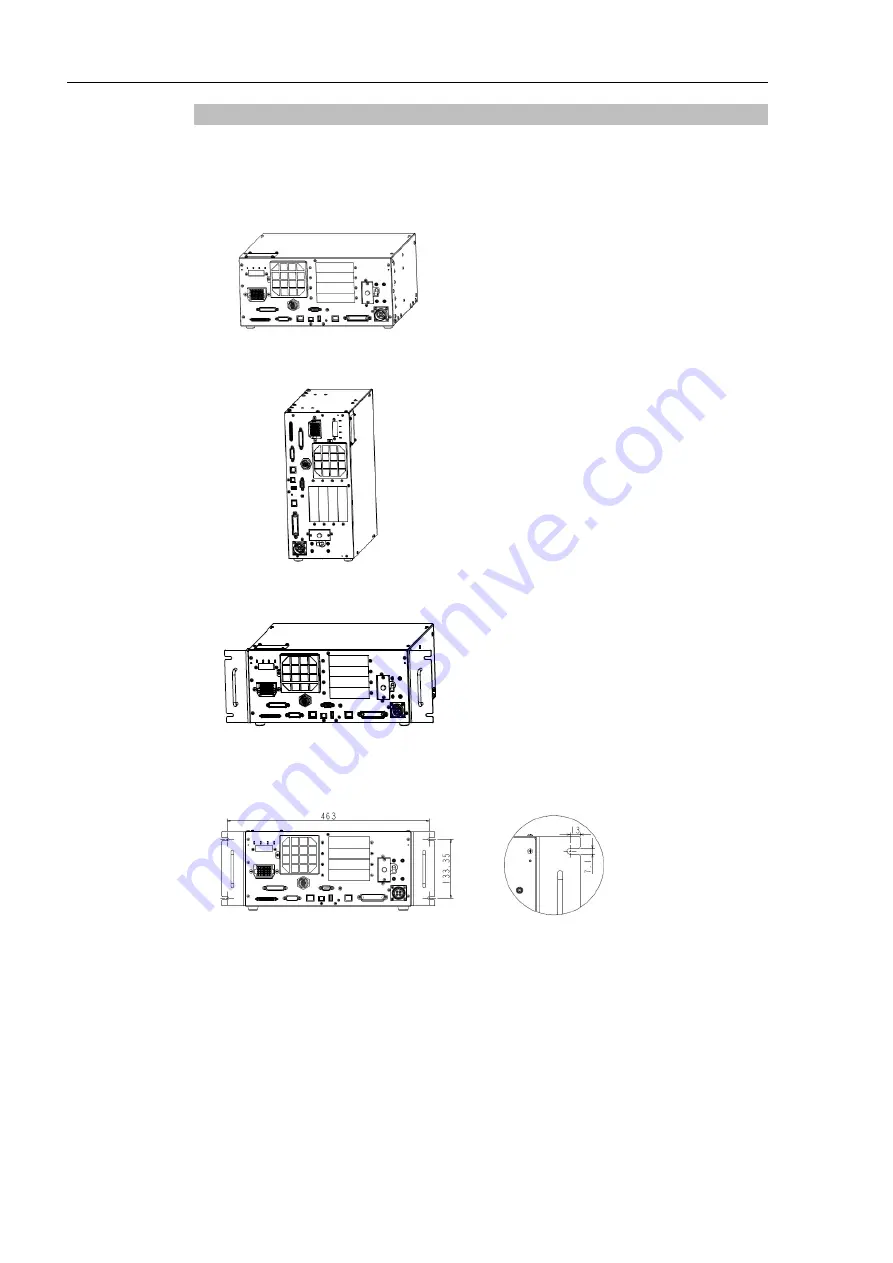
2.5.2 Installation
Install the Controller and Drive unit on a flat surface such as wall, floor, and Controller
box in the direction shown in (A) to (C).
(A) Flat mounting
(B) Upright mounting
* The rubber foot needs to be
replaced.
Attach the rubber foot with the flat
side facing the controller. Remove
the screws that interfere the rubber
foot.
(C) Rack mounting
* A plate for rack mounting is required.
For Controller installation to the Controller box or the base table, process screw hole
drilling as follows.
NOTE
Summary of Contents for RC700-D
Page 1: ...Control Unit RC700 D Original instructions Rev 2 EM221C5146F ROBOT CONTROLLER RC700 D Manual ...
Page 2: ...ROBOT CONTROLLER RC700 D Manual Rev 2 ...
Page 8: ...vi RC700 D Rev 2 ...
Page 16: ...Table of Contents xiv RC700 D Rev 2 ...
Page 18: ......
Page 80: ...Installation 5 Second Step 64 RC700 D Rev 2 ...
Page 82: ......
Page 87: ...Functions 1 Specifications RC700 D Rev 2 71 1 3 Outer Dimensions Unit mm ...
Page 190: ......
Page 202: ...Regular Inspection 3 Alarm 186 RC700 D Rev 2 ...
Page 203: ...187 Appendix ...
Page 204: ......







































































