





























5. General Maintenance
Safety and Installation (RC90-B / EPSON RC+ 7.0) Rev.4
95
5. General Maintenance
This chapter describes maintenance inspections and procedures. Performing
maintenance inspections and procedures properly is essential for preventing
trouble and ensuring safety.
Be sure to perform the maintenance inspections in accordance with the schedule.
5.1 Schedule for Maintenance Inspection
5.1.1 Manipulator
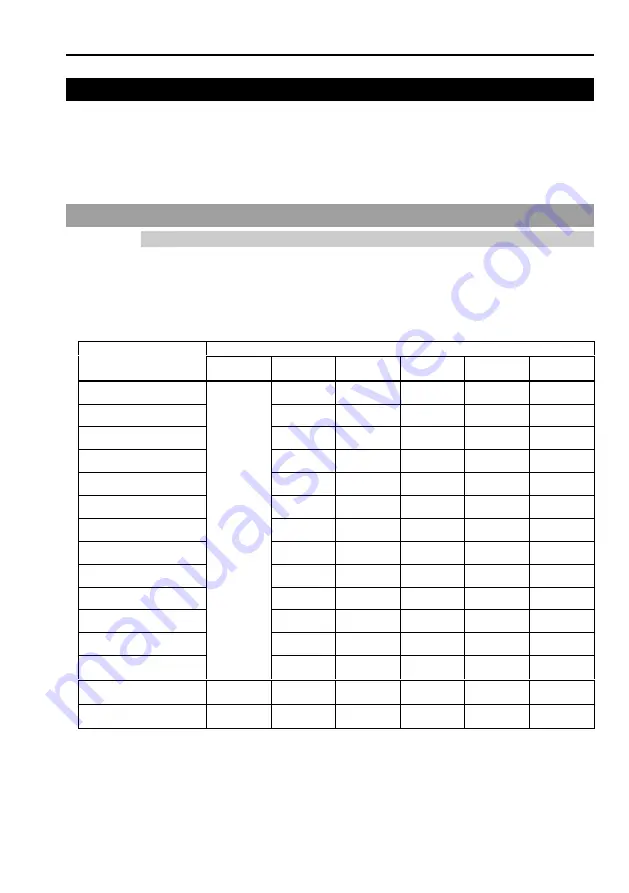
Inspection points are divided into five stages: daily, monthly, quarterly, biannual,
and annual. The inspection points are added every stage.
If the Manipulator is operated for 250 hours or longer per month, the inspection
points must be added every 250 hours, 750 hours, 1500 hours, and 3000 hours
operation.
Inspection Point
Daily
Monthly
Quarterly
Biannual
Annual
Overhaul
(replacement)
1 month (250 h)
In
sp
ect
ev
er
y d
ay
√
2 months (500 h)
√
3 months (750 h)
√
√
4 months (1000 h)
√
5 months (1250 h)
√
6 months (1500 h)
√
√
√
7 months (1750 h)
√
8 months (2000 h)
√
9 months (2250 h)
√
√
10 months (2500 h)
√
11 months (2750 h)
√
12 months (3000 h)
√
√
√
√
13 months (3250 h)
√
…
…
…
…
…
…
20,000 h
√
h = hour
Summary of Contents for RC90-B
Page 2: ...Robot System Safety and Installation RC90 B EPSON RC 7 0 Rev 4 ...
Page 16: ...Table of Contents xiv Safety and Installation RC90 B EPSON RC 7 0 Rev 4 ...
Page 46: ...1 Safety 30 Safety and Installation RC90 B EPSON RC 7 0 Rev 4 LS3 B Figure LS3 B401S ...
Page 126: ...7 Directives and Norms 110 Safety and Installation RC90 B EPSON RC 7 0 Rev 4 ...







































































