


























2. Installation
54
Safety and Installation (RC90-B / EPSON RC+ 7.0) Rev.4
2.4.4 Base Table
A base table for anchoring the Manipulator is not supplied. Please make or
obtain the base table for your Manipulator. The shape and size of the base table
differs depending on the use of the robot system. For your reference, we list
some Manipulator table requirements here.
The base table must not only be able to bear the weight of the Manipulator but also
be able to withstand the dynamic movement of the Manipulator when it operates at
maximum acceleration. Ensure that there is enough strength on the base table by
attaching reinforcing materials such as crossbeams.
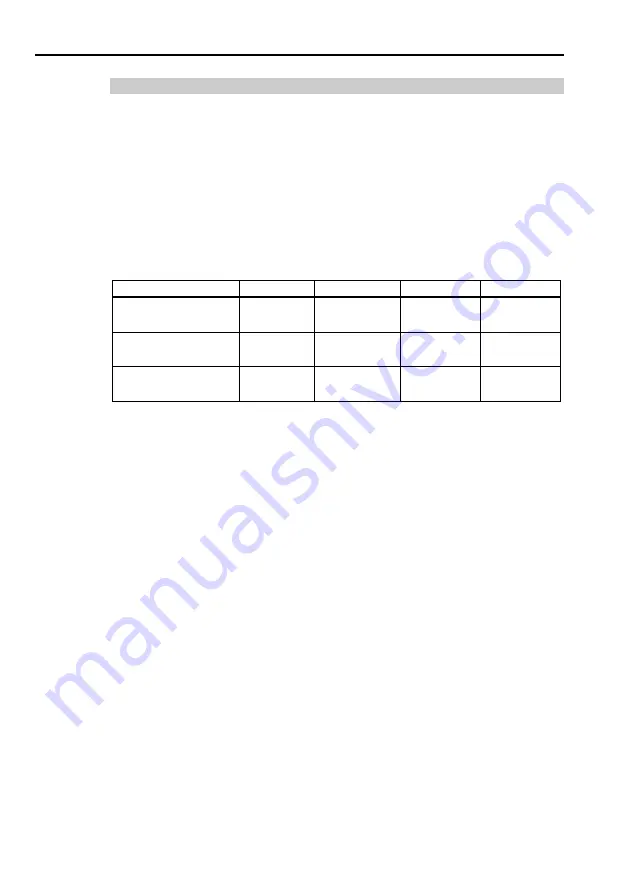
The torque and reaction force produced by the movement of the Manipulator are
as follows:
LS20-B
LS10-B
LS6-B
LS3-B
Max. Reaction torque
on the horizontal plate
1000 N·m 550
N·m
350 N·m
250
N·m
Max. Horizontal
reaction force
7500 N
3200 N
1700 N
1000 N
Max. Vertical reaction
force
2000 N
1500 N
1500 N
1000 N
The threaded holes required for mounting the Manipulator base are as follows:
LS3-B, LS6-B, LS10-B: M8
LS20-B: M12
Use mounting bolts with specifications conforming to ISO898-1 property class:
10.9 or 12.9.
The plate for the Manipulator mounting face should be 20 mm thick or more and
made of steel to reduce vibration. The surface roughness of the steel plate should
be 25
μm or less.
The table must be secured on the floor or wall to prevent it from moving.
The Manipulator must be installed horizontally.
When using a leveler to adjust the height of the base table, use a screw with M16
diameter.
Summary of Contents for RC90-B
Page 2: ...Robot System Safety and Installation RC90 B EPSON RC 7 0 Rev 4 ...
Page 16: ...Table of Contents xiv Safety and Installation RC90 B EPSON RC 7 0 Rev 4 ...
Page 46: ...1 Safety 30 Safety and Installation RC90 B EPSON RC 7 0 Rev 4 LS3 B Figure LS3 B401S ...
Page 126: ...7 Directives and Norms 110 Safety and Installation RC90 B EPSON RC 7 0 Rev 4 ...







































































