





























Maintenance 9. Troubleshooting
RC90 (EPSON RC+ 7.0) Rev.8
171
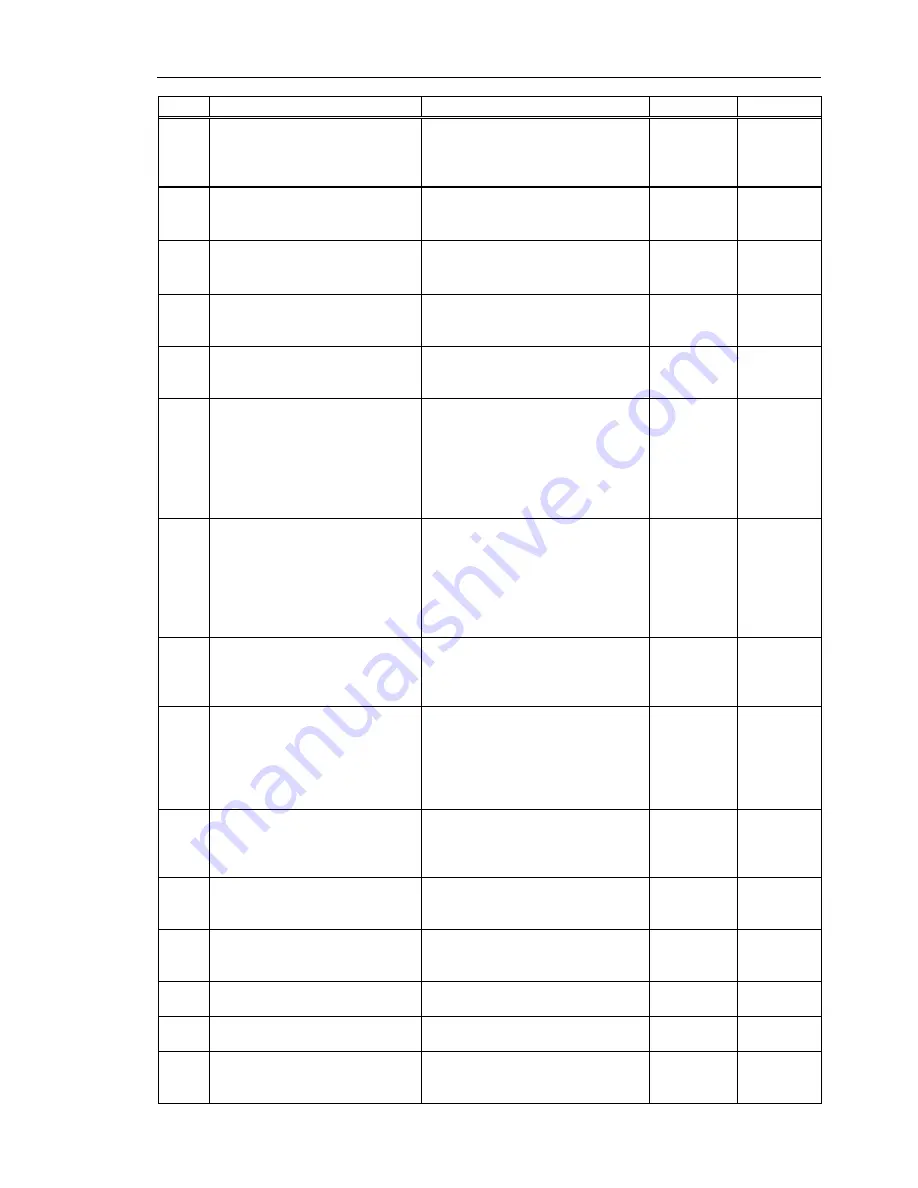
No.
Message
Remedy
Note 1
Note 2
4099
Servo error was detected during
operation.
Check if a 5000 number error is
occurring in the system history. If the
error is occurring, take measures for a
5000 number error.
4100
Communication error in motion
control module. Cannot calculate
the current point or pulse.
Reboot the controller.
Initialize the controller firmware.
Replace the controller.
4101
Communication error in the motion
control module. Cannot calculate
the current point or pulse.
Reboot the controller.
Initialize the controller firmware.
Replace the controller.
4103
Initialization failure. Motion control
module initialization error.
Reboot the controller.
Initialize the controller firmware.
Replace the controller.
4104
Positioning timeout of the joint
connected to the Pulse Generator
Board.
Cannot receive the positioning
completion signal (DEND) from the
servo motor connected to PG board.
4150
Redundant input signal failure of the
emergency stop.
The input status of the redundant
emergency stop input continuously
differs for more than two seconds.
Check whether no disconnection, earth
fault, or short-circuit of the emergency
stop input signal exits. Then reboot the
controller.
4151
Redundant input signal failure of the
safeguard.
The input status of the redundant
emergency stop input continuously
differs for more than two seconds.
Check whether no disconnection, earth
fault, or short-circuit of the emergency
stop input signal exits. Then reboot the
controller.
4152
Relay welding error of the main
circuit.
A relay welding error was detected due to
power system over current.
Replace the controller.
Replace the robot.
4153
Redundant input signal failure of the
enable switch.
The input status of the redundant enable
signal differs continuously for more than
two seconds.
Check the TP connector connection.
Replace the TP.
Replace the controller.
4154
Temperature of regeneration resistor
was higher than the specified
temperature.
Robot’s Duty is too high. Lengthen the
waiting time or reduce the Accel value.
If the error occurs although Duty was
lowered, replace the DPB.
4180
Manipulator initialization failure.
Specified manipulator was is not
found.
Configure the manipulator.
4181
Manipulator initialization failure.
Specified manipulator was in use by
another task.
Specified manipulator cannot be
configured since it is already configured.
4182
Manipulator initialization failure.
Manipulator name is too long.
Shorten the manipulator name.
4183
Manipulator initialization failure.
Manipulator data version error.
Reconfigure the manipulator.
4187
Manipulator initialization failure.
Communication error with the
module: VSRCMNPK.
Reboot the controller.
Initialize the controller firmware.
Replace the controller.
Summary of Contents for RC90
Page 1: ...Rev 8 EM158C3031F ROBOT CONTROLLER RC90 EPSON RC 7 0 ...
Page 2: ...ii ROBOT CONTROLLER RC90 EPSON RC 7 0 Rev 8 ...
Page 10: ...viii RC90 EPSON RC 7 0 Rev 8 ...
Page 17: ...Safety This section contains information for safety of the Robot System ...
Page 18: ......
Page 24: ......
Page 28: ...Setup Operation 1 Specifications 12 RC90 EPSON RC 7 0 Rev 8 1 3 Outer Dimensions Unit mm ...
Page 95: ...Maintenance This section contains maintenance procedures for the Robot Controller ...
Page 96: ......







































































