




























GX8 Manipulator 5. Motion Range
GX series Rev.2
173
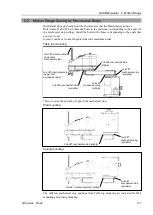
Table top mounting
GX8-A45***
GX8-A55***
GX8-A65***
A
Center of Joint #3
B
Motion range
C
Max. space
D
Base mounting surface
E
Range to mechanical stop
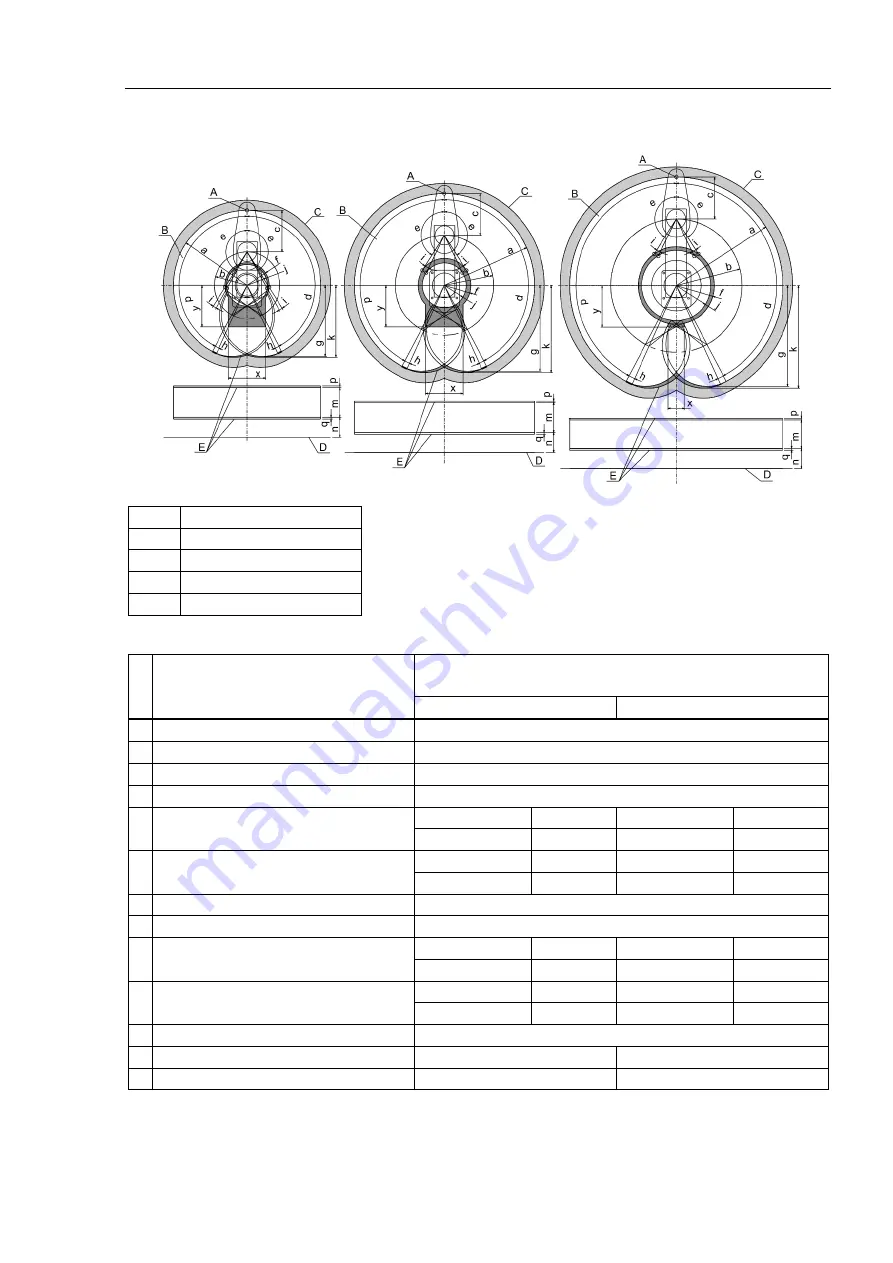
(
°
= degree)
GX8-A45**
GX8-A45**B
S, E
S, E
a
Length of Arm #1 + #2 (mm)
450
b
Arm #1 length (mm)
200
c
Arm #2 length (mm)
250
d
Joint #1 motion (°)
152
e
Joint #2 motion (°)
0 >= Z >= -270
147.5
0 >= Z >= -240
147.5
-270 > Z >= -330
145
-240 > Z >= -300
137.5
f
(Motion range)
0 >= Z >= -270
134.8
0 >= Z >= -240
134.8
-270 > Z >= -330
145
-240 > Z >= -300
137.5
g
(Motion range of the back side)
426.6
h Angle to the Joint #1 mechanical stop(°)
1.4
i Angle to the Joint #2 mechanical stop(°)
0 >= Z >= -270
3.1
0 >= Z >= -240
3.1
-270 > Z >= -330
5.6
-240 > Z >= -300
13.1
j
(Mechanical stop area)
0 >= Z >= -270
124
0 >= Z >= -240
124
-270 > Z >= -330
124
-240 > Z >= -300
121.6
k (Mechanical stop area of the back side)
428.8
x Motion prohibited area dimension (mm)
230
260
y Motion prohibited area dimension (mm)
-250
-280
Summary of Contents for SCARA GX Series
Page 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Page 2: ...GX series Manual Rev 2 ...
Page 12: ......
Page 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Page 88: ......
Page 188: ......
Page 202: ......



































































