























GX4 Manipulator 4. Setting of End Effectors
GX series Rev.2
59
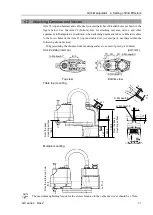
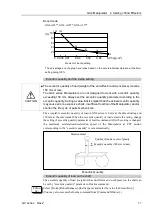
(a) Moment of inertia of a rectangular parallelepiped
h
b
L
m
Rectangular parallelepiped’s center of gravity
Rotation center
m
+ m
×
L
2
b
2
+ h
2
12
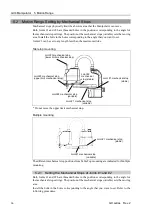
(b) Moment of inertia of a cylinder
m
+ m
×
L
2
r
2
2
m
L
r
Cylinder’s center of gravity
Rotation center
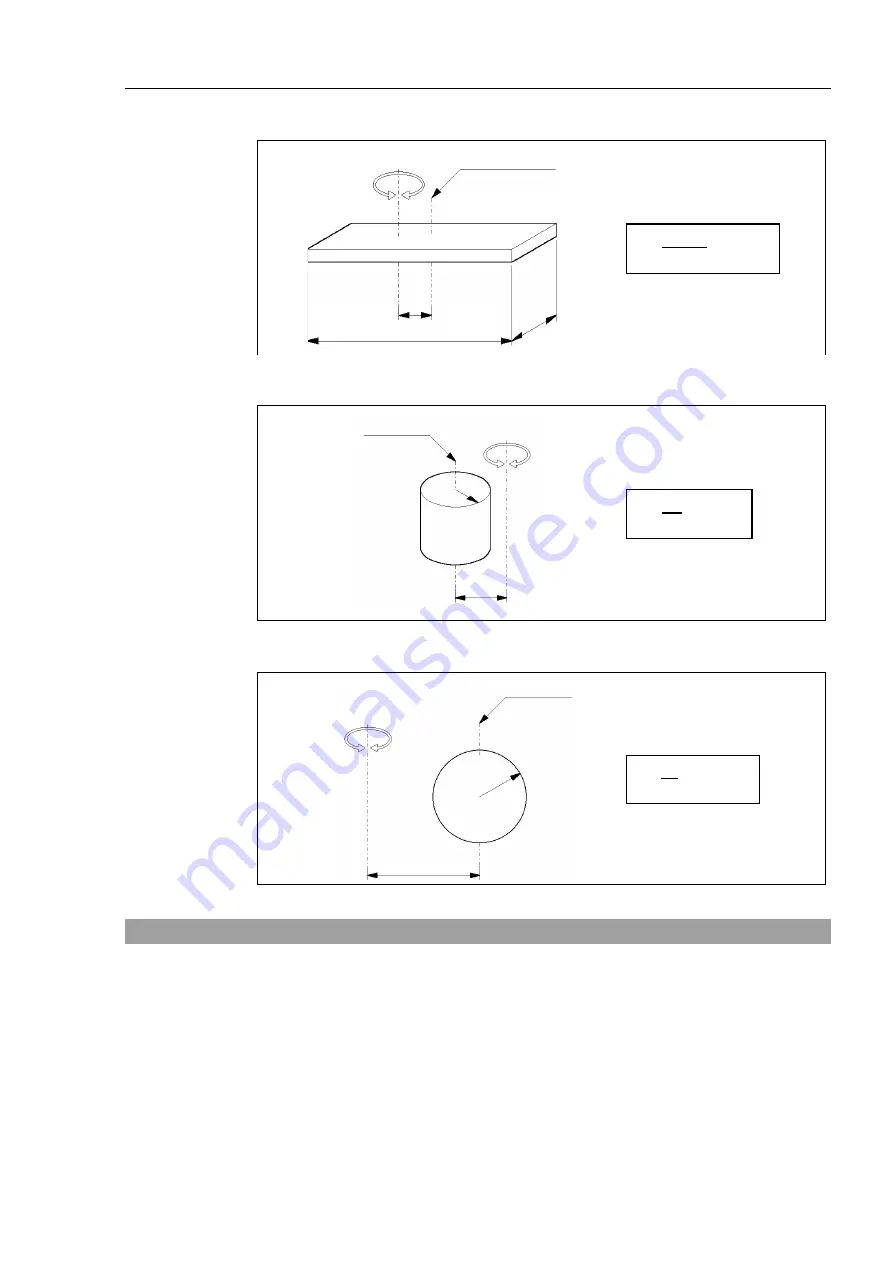
(c) Moment of inertia of a sphere
m
r
2
+ m
×
L
2
2
5
Sphere’s center of gravity
r
m
L
Rotation center
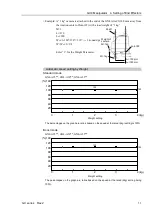
4.4 Precautions for Auto Acceleration/Deceleration of Joint #3
When you move the Manipulator in horizontal PTP motion with Joint #3 (Z) at a high
position, the motion time will be faster.
When Joint #3 gets below a certain point, then auto acceleration/deceleration is used to
reduce acceleration/deceleration. The higher the position of the shaft is, the faster the motion
acceleration/deceleration is. However, it takes more time to move Joint #3 up and down.
Adjust the position of Joint #3 for the Manipulator motion after considering the relation
between the current position and the destination position.
The upper limit of Joint #3 during horizontal motion using Jump command can be set by the
LimZ command.
Summary of Contents for SCARA GX Series
Page 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Page 2: ...GX series Manual Rev 2 ...
Page 12: ......
Page 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Page 88: ......
Page 188: ......
Page 202: ......





































































