

























GX4 Manipulator 5. Motion Range
GX series Rev.2
63
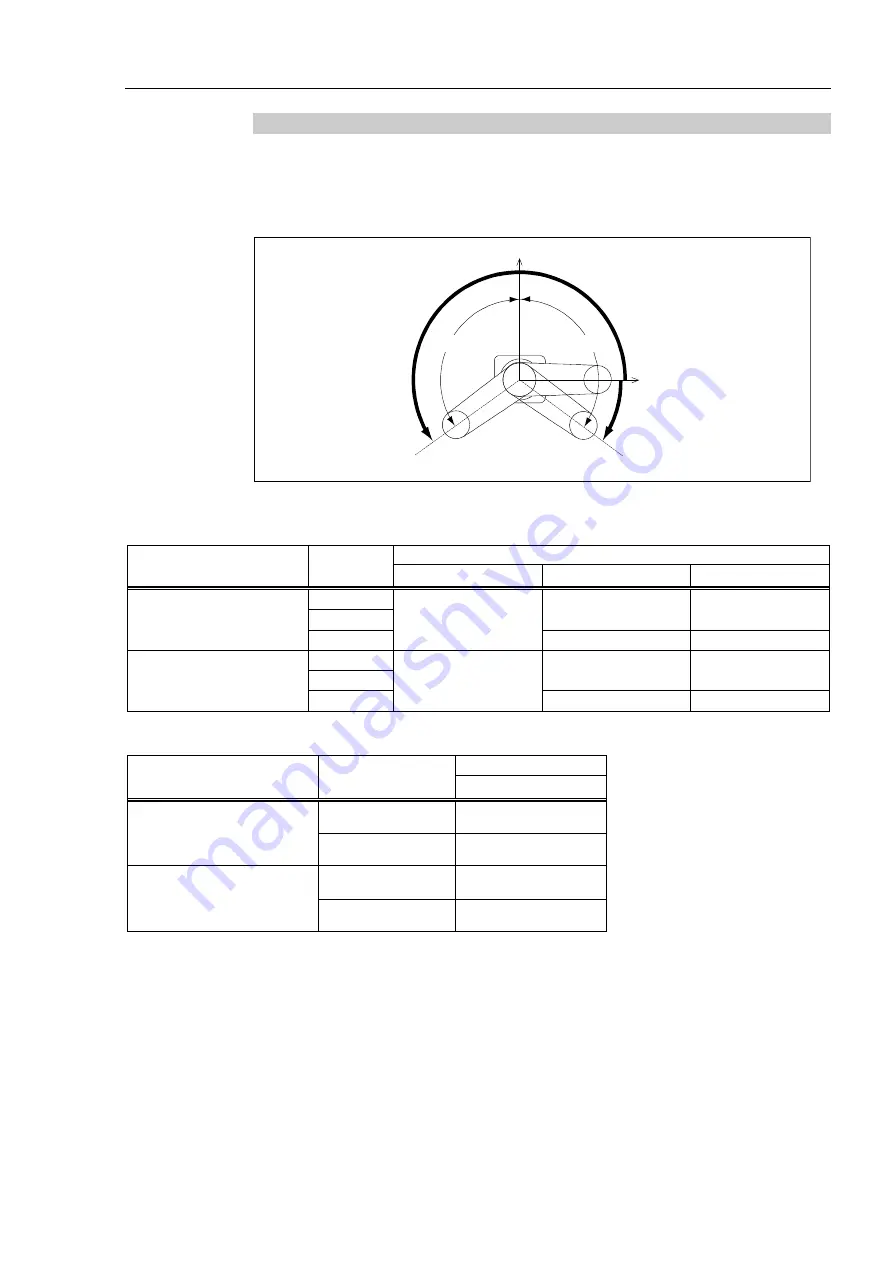
5.1.1 Max. Pulse Range of Joint #1
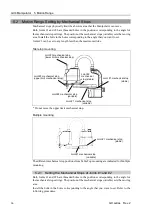
The 0 (zero) pulse position of Joint #1 is the position where Arm #1 faces toward the positive
(+) direction on the X-coordinate axis.
When the 0 pulse is a starting point, the counterclockwise pulse value is defined as the
positive (+) and the clockwise pulse value is defined as the negative (
-
).
+Y
+X 0 pulse
+ B
−
B
+ A
−
A
Table top mounting
Arm length
(mm)
Arm type
Straight
Left-curved
Right-curved
A
Max. motion range
(deg.)
250
±140
-
-
300
350
-165/110
-110/165
B
Max. pulse range
(pulse)
250
1456356 to 6699236
-
-
300
350
2184534 to 5825423 582543 to 7427414
Multiple mounting
Arm length (mm)
Arm type
Straight
A
Max. motion range (deg.)
300
±115
350
±120
B
Max. pulse range (pulse)
300
-728178 to 5971058
350
-873814 to 6116694
Summary of Contents for SCARA GX Series
Page 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Page 2: ...GX series Manual Rev 2 ...
Page 12: ......
Page 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Page 88: ......
Page 188: ......
Page 202: ......







































































