



























GX4 Manipulator 5. Motion Range
68
GX series Rev.2
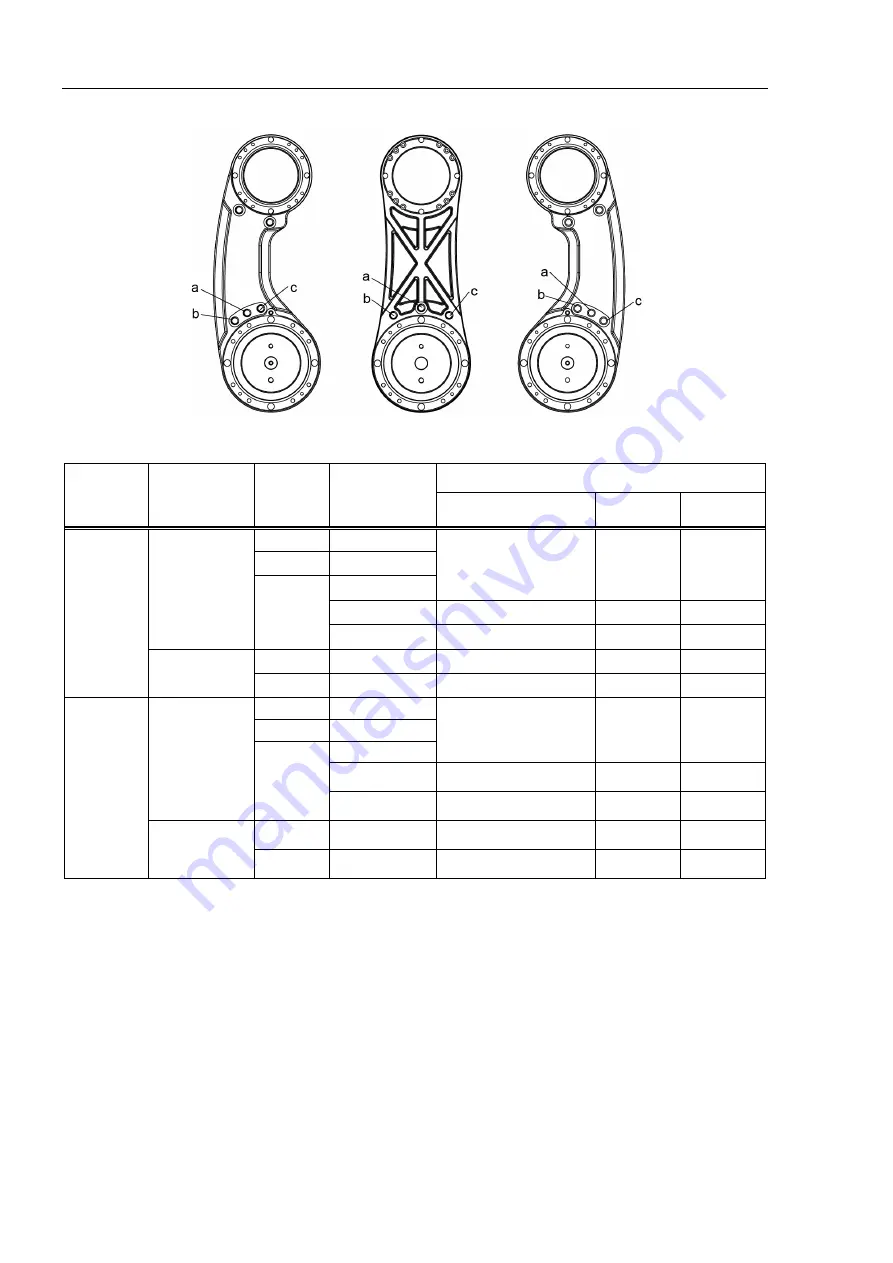
Joint #1 mechanical stop
R
L
Views from the bottom of Arm #1
Mounting
specification
Arm
length
(mm)
Arm type
Mechanical stop position
a
b
c
A
Max.
motion
range
(deg.)
Table top
250
Straight
±140
-110
+110
300
Straight
350
Straight
Left-curved
-165 to 110
-150
+95
Right-curved
-110 to 165
-95
+150
Multiple
300
Straight
±115
-102.6
+102.6
350
Straight
±120
-103.5
+103.5
B
Max.
pulse
range
(pulse)
Table top
250
Straight
-1456356 to 6699236
-582542
5825423
300
Straight
350
Straight
Left-curved
-2184534 to 5825423 -1747627
5388516
Right-curved
-582543 to 7427414
-145636
6990507
Multiple
300
Straight
-728178 to 5971058
-367002
5609882
350
Straight
-873814 to 6116694
-393216
5636096
Summary of Contents for SCARA GX Series
Page 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Page 2: ...GX series Manual Rev 2 ...
Page 12: ......
Page 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Page 88: ......
Page 188: ......
Page 202: ......






































































