



























GX4 Manipulator 5. Motion Range
GX series Rev.2
69
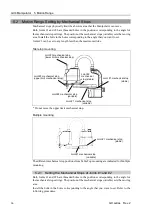
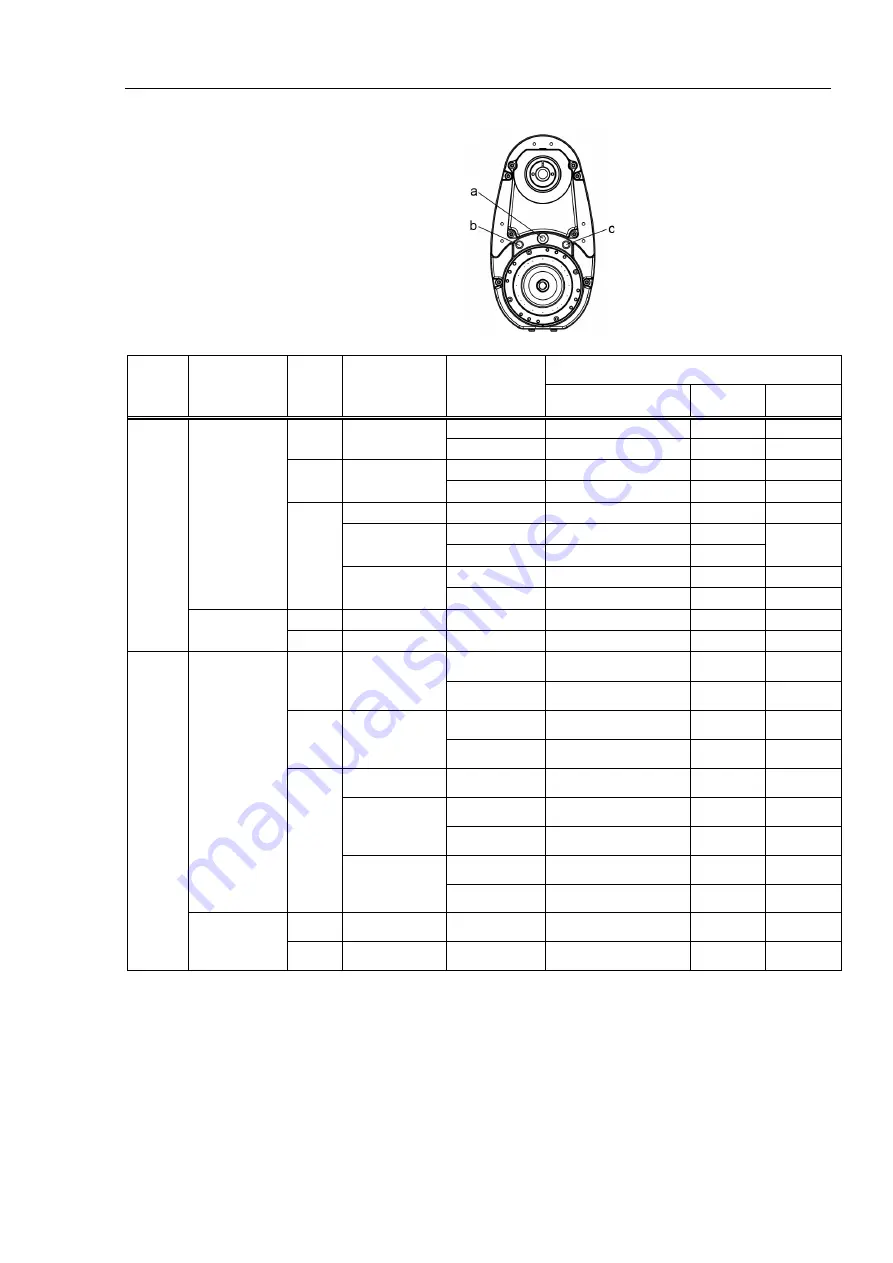
Joint #2 mechanical stop
Mounting
specification
Arm
length
(mm)
Arm type
Environment
specification
Mechanical stop position
a
b
c
A
Max.
motion
range
(deg.)
Table top
250
Straight
S, E
±141
-111
+111
C
±137
-107
+107
300
Straight
S, E
±142
-112
+112
C
±141
-111
+111
350
Straight
S, E, C
±142
-112
+112
Left-curved
S, E
-165 to 120
-135
+90
C
-160 to 120
-130
+90
Right-curved
S, E
-120 to 165
-90
+135
C
-120 to 160
-90
+130
Multiple
300
Straight
S, E, C
±135
-105
+105
350
Straight
S,C
±142
-112
+112
B
Max.
pulse
range
(pulse)
Table top
250
Straight
S, E
-2566827 to 2566827 -2020693 +2020693
C
-2494009 to 2494009 -1947876 +1947876
300
Straight
S, E
-2585032 to 2585032 -2038898 +2038898
C
-2566827 to 2566827 -2020693 +2020693
350
Straight
S, E ,C
-2585032 to 2585032 -2038898 +2038898
Left-curved
S, E
-3003734 to 2184534 -2457600 +1638400
C
-2912712 to 2184534 -2366578 +1638400
Right-curved
S, E
-2184534 to 3003734 -1638400 +2457600
C
-2184534 to 2912712 -1638400 +2366578
Multiple
300
Straight
S, E ,C
-2457600 to 2457600 -1911467 +1911467
350
Straight
S, E ,C
-2585032 to 2585032 -2038898 +2038898
In case of Multiple mounting, it is impossible to limit the operating range completely.
Because it may hit the wall within the setting range of mechanical stops.
NOTE
Summary of Contents for SCARA GX Series
Page 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Page 2: ...GX series Manual Rev 2 ...
Page 12: ......
Page 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Page 88: ......
Page 188: ......
Page 202: ......































































