























GX8 Manipulator 1. Safety
84
GX series Rev.2
For details of the Safeguard system, refer to the
Inspection Point.
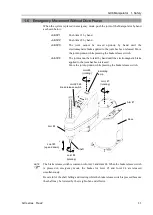
Free running distance in emergency
The operating Manipulator cannot stop immediately after the Emergency Stop switch is
pressed. In addition, time and distance of the free running vary by following factors:
Hand weight
WEIGHT Setting ACCEL Setting
Workpiece weight SPEED Setting
Posture etc.
For time and distance of the Manipulator free running, refer to
“
Appendix B: Time and
Distance of Free Running in Emergency
”.
1.5 Safeguard
To ensure safe operation, install a safety system using safety doors, light curtains, safety
floor mats, etc.
When a closed safeguard is open during robot motion, the safeguard interlock function
operates. The robot stops immediately and enters into pause state. Then, all robot motors are
turned OFF. The descriptions below explain how the safeguard input works.
Safeguard open : The robot stops immediately, motors are turned OFF, and further
operation is impossible until either the safeguard is closed or TEACH
or TEST mode is turned ON and the enable circuit is engaged.
Safeguard closed : The robot can automatically operate in unrestricted (high power) state.
For the safeguard, do not use the E-STOP circuit.
For details of wiring instructions, refer to the following manual:
RC700-D Manual “9. EMERGENCY”
For details of Safeguard, refer to the following manual:
RC700-D Manual “
2.7.
1 Connection to EMERGENCY Connector”
WARNING
■
The EMERGENCY connector on the controller has a safeguard input circuit to
connect the safety device interlock switch. To protect operators working near the
robot, be sure to connect the interlock switch and make sure that it works
properly.
■
The time to stop the robot and the stopping distance by the safeguard interlock
function will change depending on the conditions of use. Be sure to confirm that
safety is ensured according to the installation environment of the robot.
Free running distance when the safeguard is opened
The Manipulator in operation cannot stop immediately after the safeguard is opened. In
addition, time and distance of the free running vary by following factors:
Hand weight
WEIGHT Setting
ACCEL Setting
Workpiece weight SPEED Setting
Posture etc.
For time and distance of the Manipulator free running, refer to
“Appendix C: Time and
Distance of Free Running When the Safeguard is Opened”.
Summary of Contents for SCARA GX Series
Page 1: ...Original instructions Rev 2 EM221R5129F SCARA Robots GX series Manual ...
Page 2: ...GX series Manual Rev 2 ...
Page 12: ......
Page 86: ...GX4 Manipulator 5 Motion Range 76 GX series Rev 2 ...
Page 88: ......
Page 188: ......
Page 202: ......

































































