



























Maintenance 4.4 Motor Driver Module (Drive Unit)
133
“
4.4.3 Setting Up the New CT Data on the SPEL 95
After a Motor Driver module is replaced, set up the CT data in the Control Unit by
following the steps below.
For details of CT data, refer to the “CT data” in the “Maintenance 4.4.1
Layout and
Functions
”.
(1) Make sure that the cables are connected correctly.
(2) Turn ON the Control and Drive Units and start up Windows 95 and SPEL 95.
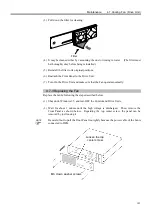
(3) Execute [Setup]-[Hardware Setting] from menu bar to display [SPEL 95 Hardware
Settings] dialog.
(4) Select [MIB] tab to show the [MIB] panel.
(5) Click the <Setup...> button for the appropriate Drive Unit to show [Drive Unit
Settings] dialog.
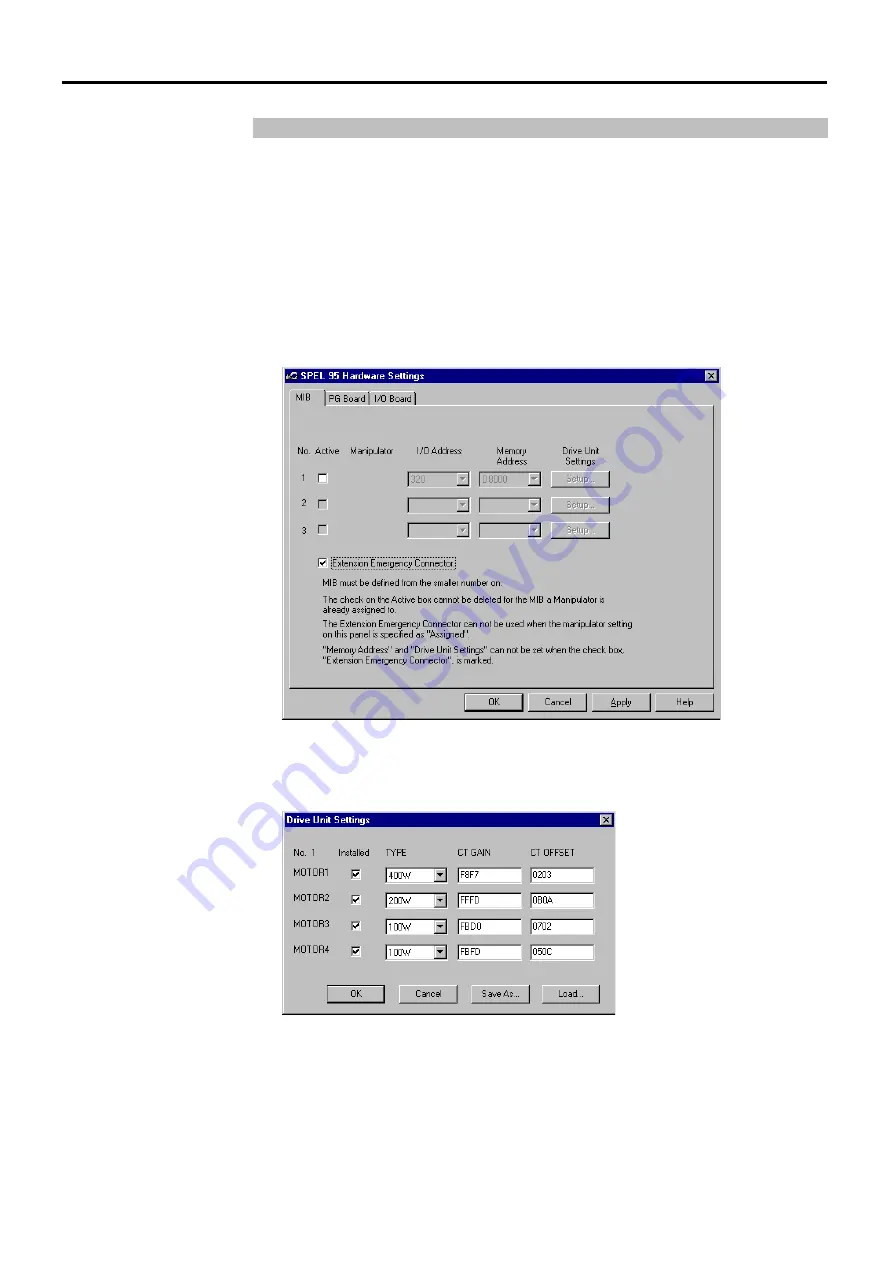
(6) Enter the [CT GAIN] and [CT OFFSET] values for the new Motor Driver module.
(7) After completing the Drive Unit settings, click the <OK> button.
The setting is effective when rebooting SPEL 95.
Summary of Contents for SRC520
Page 1: ...SRC520 Rev 4 EM015C868F ROBOT CONTROLLER ...
Page 2: ...ROBOT CONTROLLER SRC520 Rev 4 ...
Page 13: ...Function The manual herein explains in detail the functions of the robot controller SRC520 ...
Page 14: ...Function 2 ...
Page 29: ...Function 2 3 Control Unit Part Names and Functions 17 2 3 4 Dimensions mm ...
Page 35: ...Function 2 4 Drive Unit Part Names and Functions 23 2 4 5 Dimensions mm ...
Page 36: ...Function 2 4 Drive Unit Part Names and Functions 24 ...
Page 50: ...Function 3 5 Noise Countermeasures Installation 38 ...
Page 66: ...Function 6 3 Pin Assignments D I O Connector 54 ...
Page 96: ...Function 9 2 Preparation for Communication RS 232C Settings 84 ...
Page 106: ...Function 11 Stand alone Option for SRC520 94 ...
Page 108: ...Maintenance 96 ...
Page 139: ...Maintenance 4 3 Drive Unit Drive Unit 127 4 3 Drive Unit 4 3 1 System Configuration ...







































































