



























Function 4. OPTIONAL DEVICE connector
40
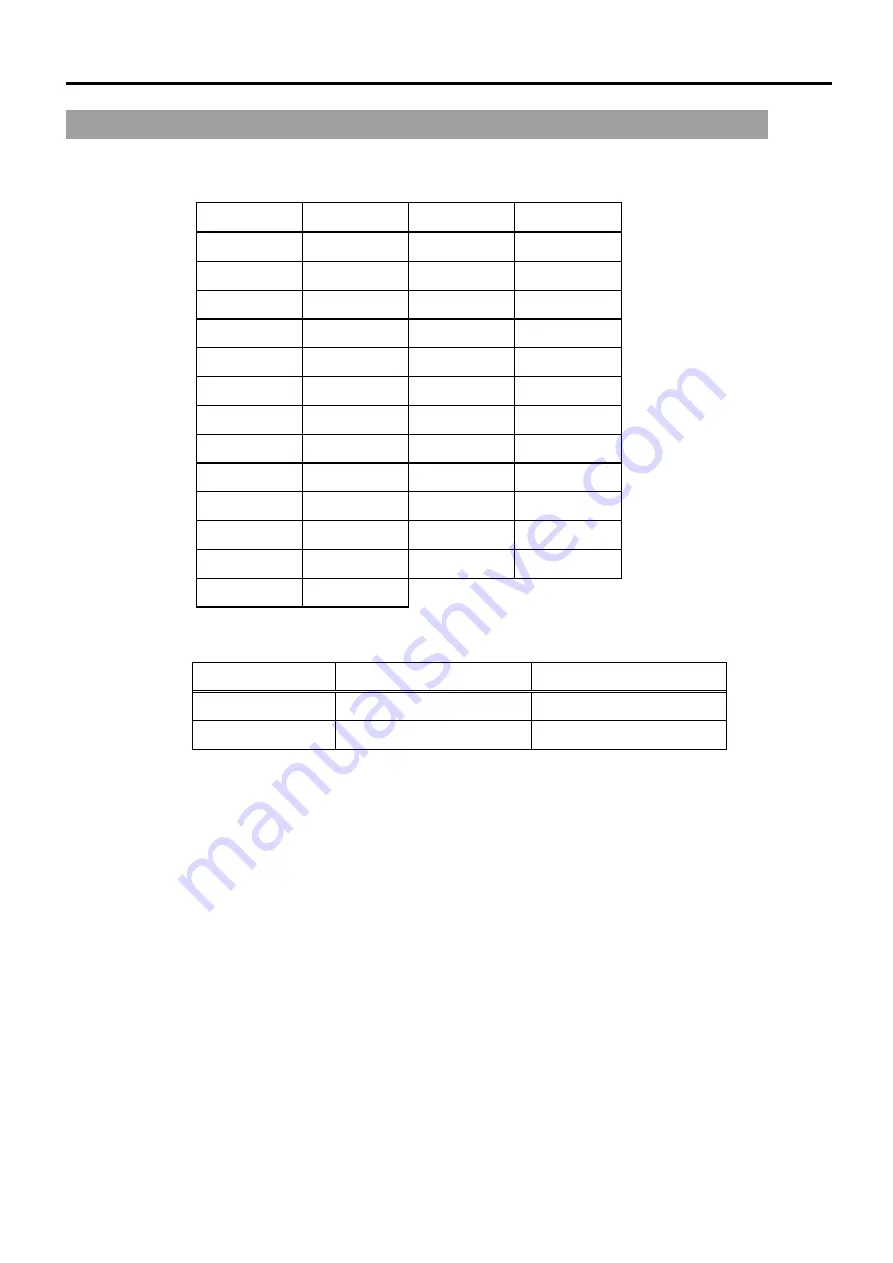
4.4 Pin Assignments
In case you wish to connect your own mode-switching switch to the OPTIONAL
DEVICE Port Short connector, refer to the following pin assignments.
Pin number Signal name Pin number Signal name
1 FG
14 ENABLE
2 SD
15 SG
3 RD
16
-
4 RS
17
-
5 CS
18 KEY1
6 E_SW11
19 KEY2
7 SG
20 ER
8 CD
21
-
9 E_SW21
22
-
10 E_SW12
23
-
11 E_SW22
24
-
12
-
25 +12V
13 SG
Each mode is dictated by the signals at KEY1 and KEY2 as follows:
Operation Mode
KEY1
KEY2
ATTEND
Connect to SG (13 pin)
Open
NORMAL
Open
Connect to SG (13 pin)
Use pins #13, #18 and #19 only.
If you are connecting an Emergency Stop switch, connect it to the EMERGENCY
connector at the Drive Unit.
Summary of Contents for SRC520
Page 1: ...SRC520 Rev 4 EM015C868F ROBOT CONTROLLER ...
Page 2: ...ROBOT CONTROLLER SRC520 Rev 4 ...
Page 13: ...Function The manual herein explains in detail the functions of the robot controller SRC520 ...
Page 14: ...Function 2 ...
Page 29: ...Function 2 3 Control Unit Part Names and Functions 17 2 3 4 Dimensions mm ...
Page 35: ...Function 2 4 Drive Unit Part Names and Functions 23 2 4 5 Dimensions mm ...
Page 36: ...Function 2 4 Drive Unit Part Names and Functions 24 ...
Page 50: ...Function 3 5 Noise Countermeasures Installation 38 ...
Page 66: ...Function 6 3 Pin Assignments D I O Connector 54 ...
Page 96: ...Function 9 2 Preparation for Communication RS 232C Settings 84 ...
Page 106: ...Function 11 Stand alone Option for SRC520 94 ...
Page 108: ...Maintenance 96 ...
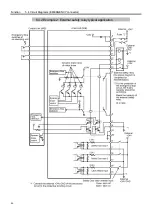
Page 139: ...Maintenance 4 3 Drive Unit Drive Unit 127 4 3 Drive Unit 4 3 1 System Configuration ...







































































