




























Setup & Operation 5. Motion Range
52
VT Rev.1
5. Motion Range
CAUTION
■
When setting up the motion range for safety, both the pulse range and
mechanical stops must always be set at the same time. Failure to do so may
cause serious safety problems.
The motion range is preset at the factory as explained in
Setup & Operation: 5.4 Standard
Motion Range
. That is the maximum motion range of the Manipulator.
There are three methods for setting the motion range described as follows:
1. Setting by pulse range (for all joints)
2. Setting by mechanical stops
3. Setting the Cartesian (rectangular) range in the X, Y coordinate system of the
Manipulator
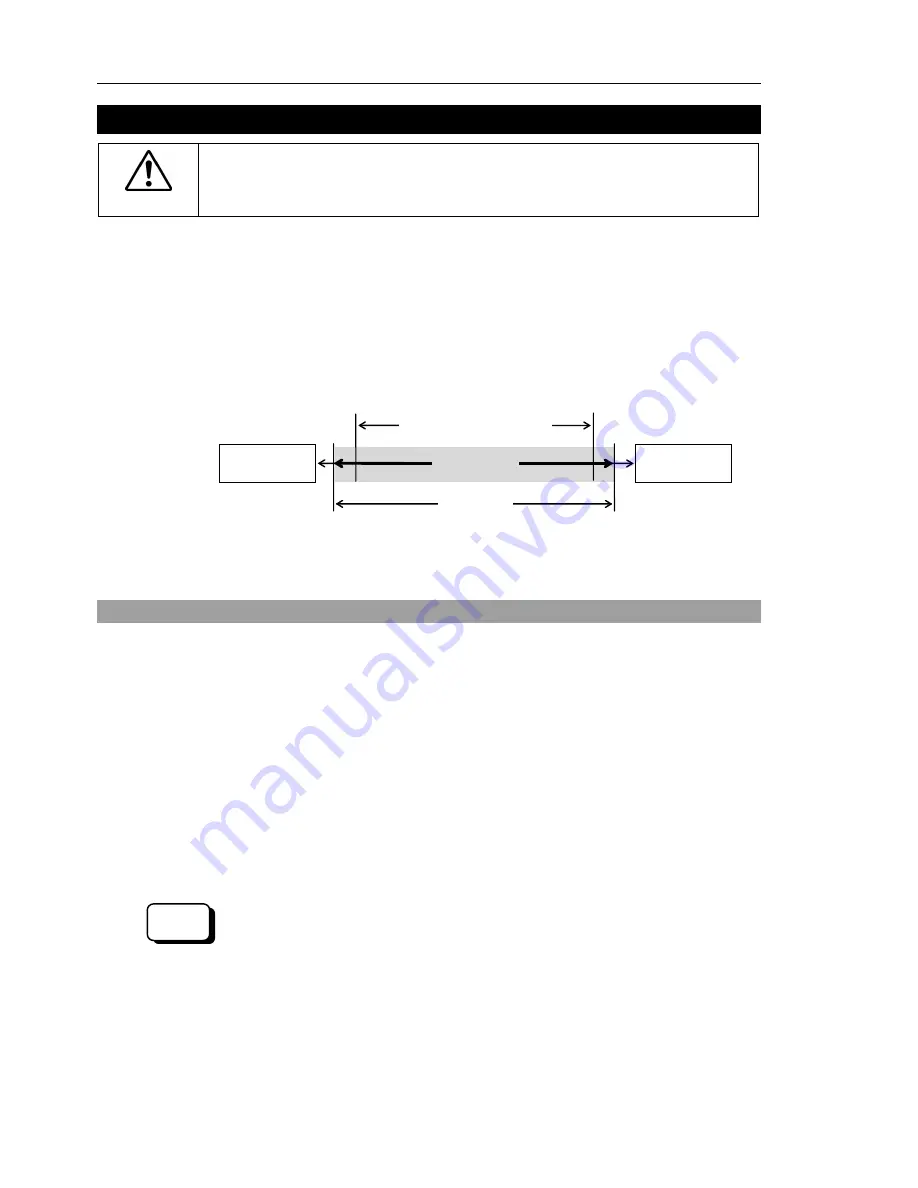
Mechanical
stop
Rectangular range setting
Pulse range
Motion range
Mechanical
stop
When the motion range is changed due to layout efficiency or safety, follow the
descriptions in
5.1
to
5.3
to set the range.
5.1 Motion Range Setting by Pulse Range (for All Joints)
Pulses are the basic unit of Manipulator motion. The motion range of the Manipulator is
controlled by the pulse range (the lower limit and the upper limit) of each axis.
Pulse values are read from the encoder output of the servo motor.
The pulse range should be set within the mechanical stop range.
The Arm #4 and #6 do not have a mechanical stop.
Once the Manipulator receives an operating command, it checks whether the target
position specified by the command is within the pulse range before operating. If the
target position is out of the set pulse range, an error occurs and the Manipulator does not
move.
EPSON
RC+
The pulse range can be set in [Tools]-[Robot manager]-[Range] panel.
You may also execute the Range command from the [Command Window].
NOTE
NOTE
Summary of Contents for VT Series
Page 1: ...6 Axis Robots VT series MANIPULATOR MANUAL Rev 1 EM18YR3817F ...
Page 2: ...MANIPULATOR MANUAL VT series Rev 1 ...
Page 8: ...vi VT Rev 1 ...
Page 16: ...TABLE OF CONTENTS xiv VT Rev 1 ...
Page 18: ......
Page 31: ...Setup Operation 2 Specifications VT Rev 1 15 2 4 Outer Dimensions ...
Page 32: ...Setup Operation 2 Specifications 16 VT Rev 1 Unit mm ...
Page 33: ...Setup Operation 2 Specifications VT Rev 1 17 2 5 Standard Motion Range Unit mm ...
Page 130: ......
Page 138: ...Maintenance 3 Manipulator Structure 122 VT Rev 1 3 Manipulator Structure ...


































































