







7
SLT SETUP
The Proto-X SLT Nano Quadcopter can be used with other SLT controllers.
If your controller has programmable settings or if it uses an ANYLINK/
ANYLINK2 adapter, please use these settings as a guide to get started.
Tactic
®
TX650/Futaba
®
Type
Servo Reverse
Travel Adjustment
Dual Rates (D/R)
Exponential (EXPO)
Throttle Curve
Timer (TIMR)
AILE
1
ELEV
THRO
RUDD
2
3
4
AIRPLANE
50
5 Min
100%
100%
100%
100%
N
N
N
N
0
25
75
100
100/50
100/50
100/50
–25
–25
–25
Spektrum
®
w/Anylink2
™
Type
Servo Reverse
Travel Adjustment
Dual Rates (D/R)
Exponential (EXPO)
Throttle Curve
Timer (TIMR)
AILE
1
ELEV
THRO
RUDD
2
3
4
AIRPLANE
50
5 Min
100%
100%
100%
100%
R
R
R
R
0
25
75
100
100/50
100/50
100/50
+25
+25
0
Note:
The LEDs cannot be toggled On/Off with an SLT controller. The
quadcopter can be flipped when the controller is on high rates.
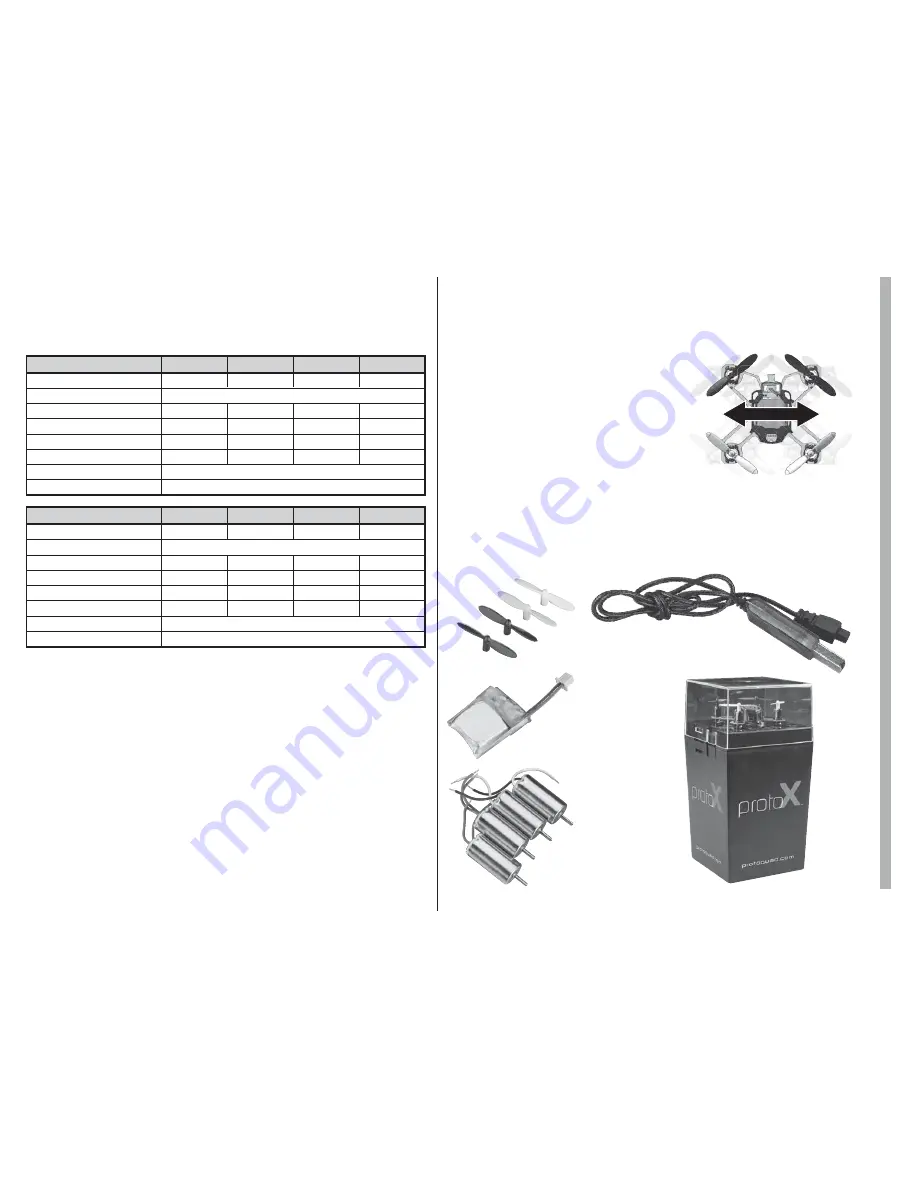
LINKING THE QUADCOPTER
AND CONTROLLER
The Proto-X SLT uses Wavelink
™
technology to link it to the controller. If
all four blue LEDs are flashing and the quadcopter will not respond to any
commands, use the following procedure.
1. Turn off the controller but leave the
Proto-X SLT on.
2. Turn on the controller.
3. Immediately pick up the quadcopter and
wave it side to side for two seconds. Move
the quadcopter at a moderate speed at
least 12 inches in each direction.
4. Place the quadcopter on a level surface. The blue LEDs will flash on one
side then the other while the quadcopter is linking to the transmitter. The
LEDs will become steady when the quadcopter is linked to the controller.
SPARE/OPTIONAL PARTS
ESTE4615
Rotor Blade Set (4)
ESTE4616
USB Charge Cord
ESTE4617
Motor Set (4)
ESTE4618
LiPo 1S 3.7V 100 mAh
ESTE4622
Display Case
(Optional)




































































