



























ProNet series AC servo system User’s manual V.1.08
- 36 -
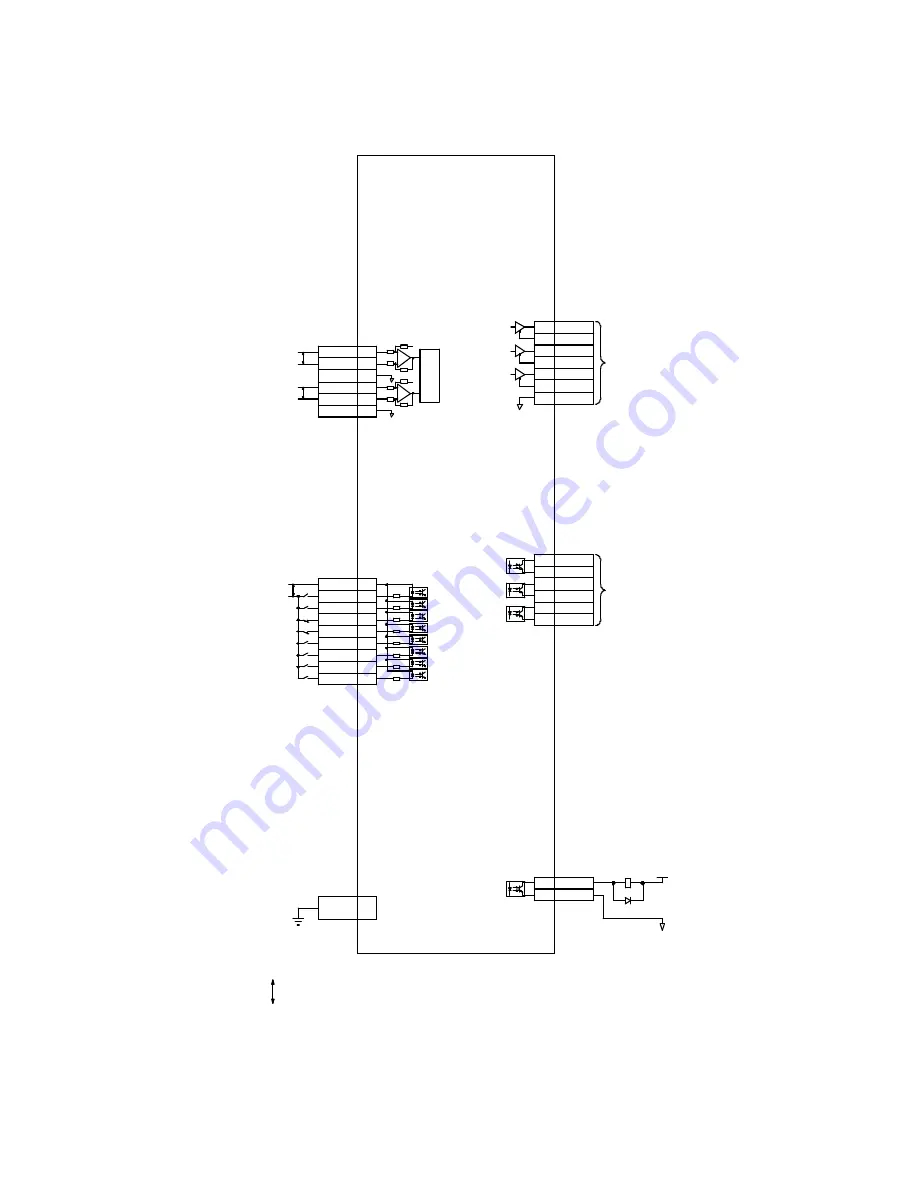
3.5.6 Torque Control Mode
+
A /D
3.3K Ω
+24V
P
P
P
-
-
+
ref
ref
40K
10K
40K
10K
1
Ry
1D
+24
V
0
V
PAO+
20
PAO-
21
PBO+
22
PBO-
23
PCO+
24
PCO-
25
DGND
50
TGON+
5
TGON-
6
S-RDY+
9
S-RDY-
10
V-CMP+
11
V-CMP-
12
ALM+
7
ALM-
8
VREF+
1
VREF-
2
AGND
3
TREF+
26
TREF-
27
AGND
28
DICOM
13
S-ON
14
P-CON
15
P-OT
16
N-OT
17
ALM-RST 39
CLR
40
P-CL
41
N-CL
42
Shield
ProNet
Series Servodrives
Speed Limit Input(±1V~10V/Rated Speed)
Torque Limit Input (±1V~10V/Rated Torque)
Signal allocatons can be modified:
S-ON: Servo ON
P-CON: P Control
P- OT: For war d Run Pr ohibited
N- OT: Rever se Run Pr ohibited
ALM-RST: Alarm Reset
CLR: Clear Error Pulse
P- CL: For war d Tor que Limit
N- CL: Rever se Tor que Limit
Connect Shield to Connector Shell.
Represents Twisted-pair Wires
Shell
ALM: Servo Alarm Output
Photocoupler Output:
Maximum Operating Voltage:DC30V
Maximum Output Current:DC50mA
Signal Allocations can be Modified:
V-CMP: Speed Coincidence
COIN: Positioning Completion
TGON:Rotation Detection
S-RDY:Servo Ready
CLT:Torque Limit Detection
BK:Brake Interlock
PGC: Encoder C-Pulse Output
PG Divided Ratio Output:
Applicable Line Receiver
AM26LS32A Manufactured by TI or the Equivalent.







































































