




























ProNet series AC servo system User’s manual V.1.08
- 42 -
The servomotor can be operated using only the panel operator without reference from the host
controller.
Pay attention that the Forward Run Prohibited (P-OT) and Reverse Run Prohibited (N-OT) signals are
invalid during JOG mode operation.
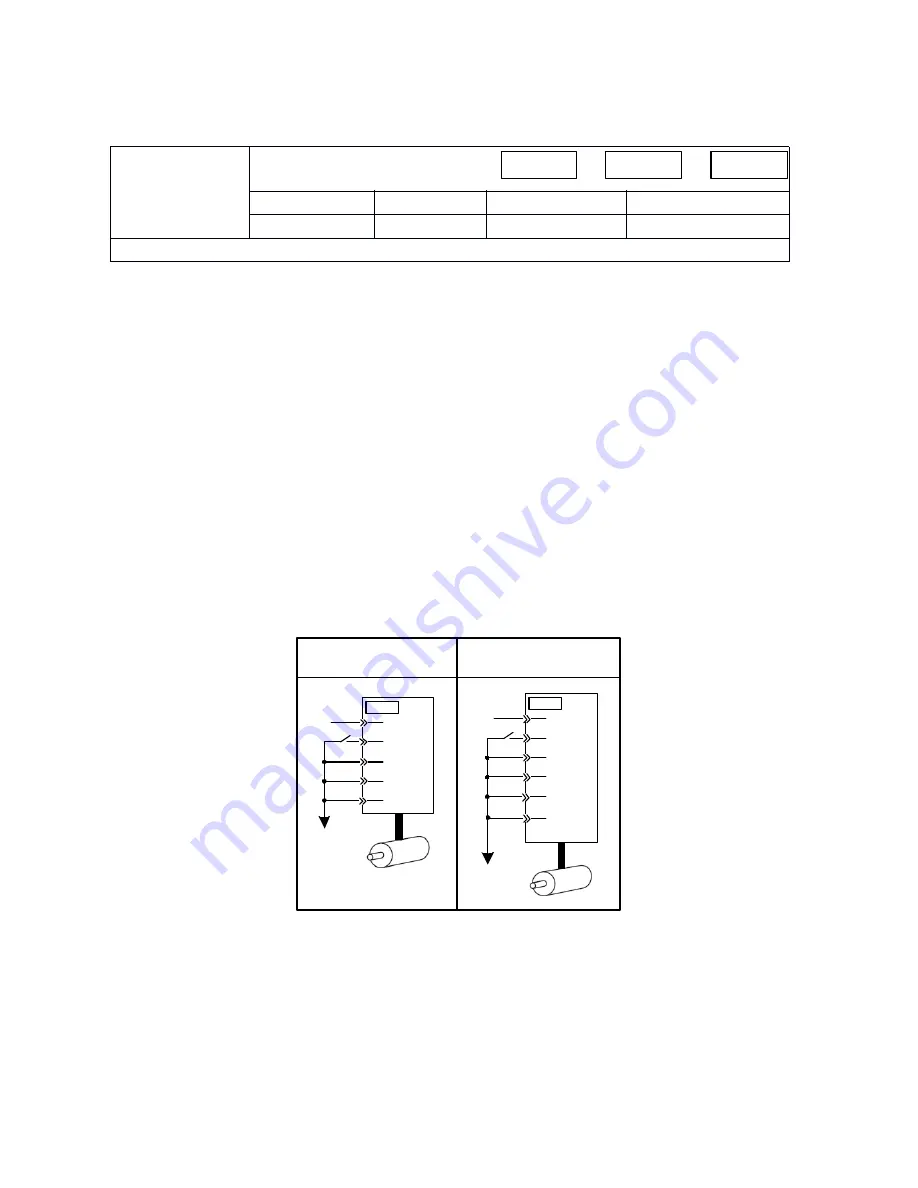
4.1.2 Trial Operation for Servomotor without Load from Host Reference
Check that the servomotor move reference or I/O signals are correctly set from the host controller to the
servodrive.
Also check the wiring and polarity between the host controller and servodrive, and the servodrive
operation setting are correct. This is final check before connecting the servomotor to the machine.
(1)Servo
(1)Servo
(1)Servo
(1)Servo ON
ON
ON
ON Command
Command
Command
Command from
from
from
from the
the
the
the Host
Host
Host
Host
The following circuits are required: External input signal circuit or equivalent.
Pn305
JOG
JOG
JOG
JOG Speed
Speed
Speed
Speed
Setting
Setting
Setting
Setting Range
Range
Range
Range
Setting
Setting
Setting
Setting Unit
Unit
Unit
Unit
Factory
Factory
Factory
Factory Setting
Setting
Setting
Setting
Setting
Setting
Setting
Setting Validation
Validation
Validation
Validation
0~6000
rpm
500
Immediately
Set the utility function Fn002 (JOG Mode Operation) to the reference value of servomotor speed.
0
0
0
0V
V
V
V
+
+
+
+2 4
2 4
2 4
2 4 V
V
V
V
////S
S
S
S----O N
O N
O N
O N
P
P
P
P----O T
O T
O T
O T
N
N
N
N----O T
O T
O T
O T
V
V
V
V----R E F
R E F
R E F
R E F
1 3
1 3
1 3
1 3
3 0
3 0
3 0
3 0
1 7
1 7
1 7
1 7
1 6
1 6
1 6
1 6
1 4
1 4
1 4
1 4
C N
C N
C N
C N 1
1
1
1
1 3
1 3
1 3
1 3
1
1
1
1
1 7
1 7
1 7
1 7
1 6
1 6
1 6
1 6
1 4
1 4
1 4
1 4
C N
C N
C N
C N 1
1
1
1
3 2
3 2
3 2
3 2
+
+
+
+2 4
2 4
2 4
2 4 V
V
V
V
////S
S
S
S----O N
O N
O N
O N
P
P
P
P----O T
O T
O T
O T
N
N
N
N----O T
O T
O T
O T
P U L S
P U L S
P U L S
P U L S
S IG N
S IG N
S IG N
S IG N
Speed Control
Speed Control
Speed Control
Speed Control
((((S tan d ard S ettin g
S tan d ard S ettin g
S tan d ard S ettin g
S tan d ard S ettin g))))
[[[[P n
P n
P n
P n 0 0 5
0 0 5
0 0 5
0 0 5 =
=
=
=H
H
H
H....
□ □ 0□]
Position Con tr ol
Position Con tr ol
Position Con tr ol
Position Con tr ol
[[[[P n
P n
P n
P n 0 0 5
0 0 5
0 0 5
0 0 5 =
=
=
=H
H
H
H....
□ □ 1□]
0
0
0
0V
V
V
V
Speed
Position
Torque







































































