




























Chapter 4 Operation
- 45 -
(3)
(3)
(3)
(3)Operating
Operating
Operating
Operating Procedure
Procedure
Procedure
Procedure in
in
in
in Position
Position
Position
Position Control
Control
Control
Control Mode
Mode
Mode
Mode (Pn005
(Pn005
(Pn005
(Pn005=H.
=H.
=H.
=H.□□
□□
□□
□□1
1
1
1□
□
□
□))))
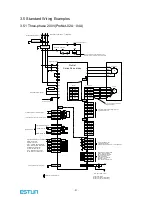
The following circuit is required: External input signal circuit or equivalent.
Step
Step
Step
Step
Description
Description
Description
Description
Check
Check
Check
Check Method
Method
Method
Method and
and
and
and Remarks
Remarks
Remarks
Remarks
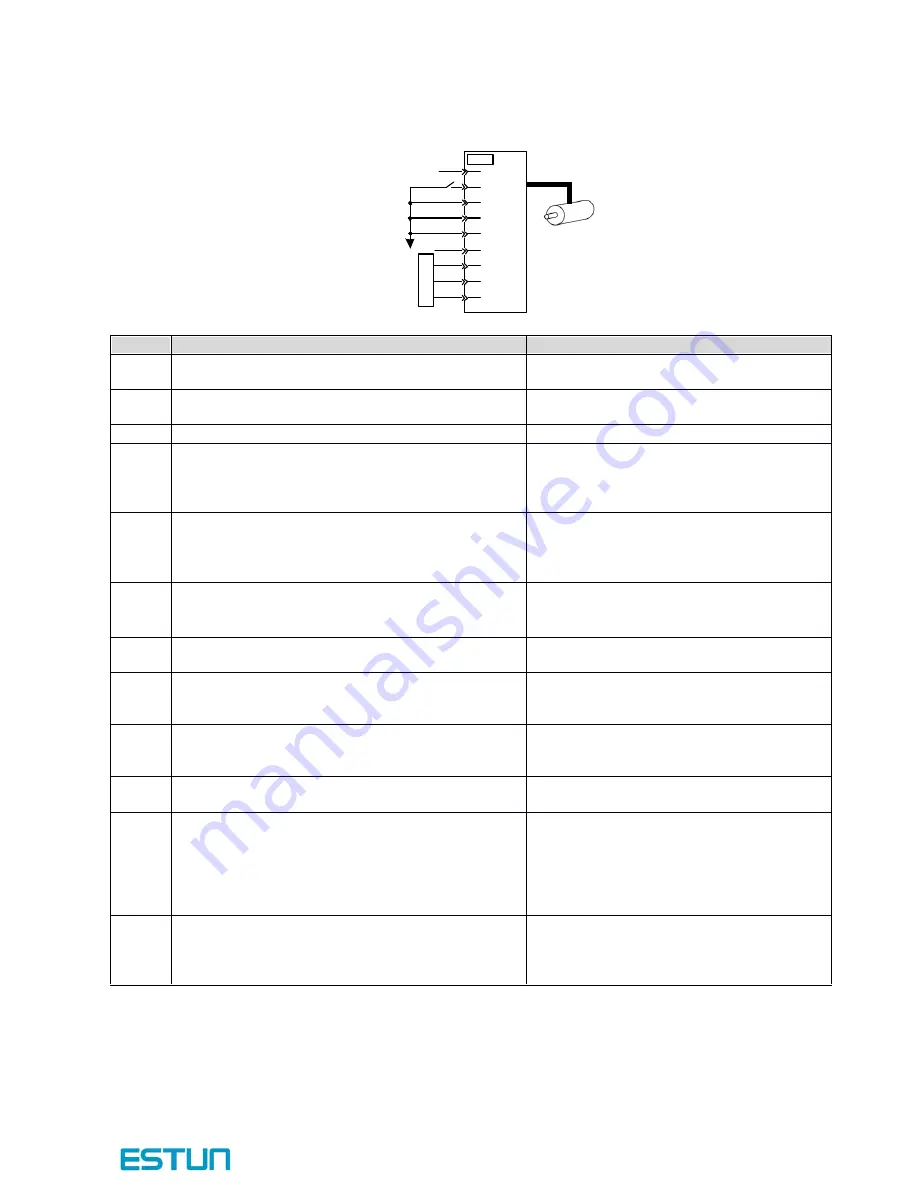
1
Match the reference pulse form with the pulse
output form from the host controller.
Set the reference pulse form with Pn004.2.
2
Set the reference unit and electronic gear ratio so
that it coincides with the host controller setting.
Set the electronic gear ratio with Pn201(or
Pn203)/Pn202.
3
Turn the power and the servo ON input signal ON.
4
Send the pulse reference for the number of
servomotor rotation easy to check (for example,
one servomotor revolution) and with slow speed
from the host controller in advance.
Set the servomotor speed of several
100min
-1
for the reference pulse speed
because such speed is safe.
5
Check the number of reference pulses input to the
servodrive by the changed amount before and after
the Un013 and Un014(input reference pulse
counter)[pulse] were executed.
Refer to
5.1.6
5.1.6
5.1.6
5.1.6 Operation
Operation
Operation
Operation in
in
in
in Monitor
Monitor
Monitor
Monitor Mode
Mode
Mode
Mode
for how it is displayed.
6
Check whether the actual number of servomotor
rotation Un009
、
Un010 coincides with the number
of input reference pulse.
Refer to
5.1.6
5.1.6
5.1.6
5.1.6 Operation
Operation
Operation
Operation in
in
in
in Monitor
Monitor
Monitor
Monitor Mode
Mode
Mode
Mode
for how it is displayed.
7
Check that the servomotor rotation direction is the
same as the reference.
Check the input pulse polarity and input
reference pulse form.
8
Input the pulse reference with the large number of
servomotor rotation from the host controller to
obtain the constant speed.
Set the servomotor speed of serval 100min
-
1
for the reference pulse speed because
such speed is safe.
9
Check the reference pulse speed input to the
servodrive using the Un008(input reference pulse
speed)[min
-1
].
Refer to
5.1.6
5.1.6
5.1.6
5.1.6 Operation
Operation
Operation
Operation in
in
in
in Monitor
Monitor
Monitor
Monitor Mode
Mode
Mode
Mode
for how it is displayed.
10
Check the servomotor speed using the Un000
(servomotor speed) [min
-1
].
Refer to
5.1.6
5.1.6
5.1.6
5.1.6 Operation
Operation
Operation
Operation in
in
in
in Monitor
Monitor
Monitor
Monitor Mode
Mode
Mode
Mode
for how it is displayed.
11
Check the servomotor rotation direction.
To change the servomotor rotation direction
without changing the input reference pulse
form, refer to
4.3.2
4.3.2
4.3.2
4.3.2 Switching
Switching
Switching
Switching the
the
the
the
Servomotor
Servomotor
Servomotor
Servomotor Rotation
Rotation
Rotation
Rotation Direction
Direction
Direction
Direction
. Perform
the operation from step 8 again after the
servomotor rotation direction is changed.
12
When the pulse reference input is stopped and
servo OFF status enters, the trial operation for
servomotor without load in position control mode is
completed.
1 3
1 3
1 3
1 3
4 0
4 0
4 0
4 0
1 7
1 7
1 7
1 7
1 6
1 6
1 6
1 6
1 4
1 4
1 4
1 4
C N
C N
C N
C N 1
1
1
1
3 0
3 0
3 0
3 0
+
+
+
+2 4
2 4
2 4
2 4 V
V
V
V
////S
S
S
S----O N
O N
O N
O N
P
P
P
P----O T
O T
O T
O T
N
N
N
N----O T
O T
O T
O T
C L R
C L R
C L R
C L R
PU L S
PU L S
PU L S
PU L S
3 1
3 1
3 1
3 1
3 2
3 2
3 2
3 2
3 3
3 3
3 3
3 3
////PU L S
PU L S
PU L S
PU L S
S I G N
S I G N
S I G N
S I G N
////S I G N
S I G N
S I G N
S I G N
Servodrive
Servodrive
Servodrive
Servodrive
Reference pulse
according to parameter
P n 0 0 4 .2 s e t t i ng.
P
ul
se
r
ef
er
e
nc
e







































































