




























Chapter 4 Operation
- 52 -
(2)Enabling/Disabling
(2)Enabling/Disabling
(2)Enabling/Disabling
(2)Enabling/Disabling the
the
the
the Overtravel
Overtravel
Overtravel
Overtravel Signal
Signal
Signal
Signal
A parameter can be set to disable the overtravel signal. If the parameter is set, there is no need to wire
the overtravel input signal.
(
3
3
3
3
)
Selecting
Selecting
Selecting
Selecting the
the
the
the Servomotor
Servomotor
Servomotor
Servomotor Stop
Stop
Stop
Stop Method
Method
Method
Method
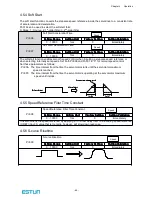
This is used to set the stop method when an overtravel(P-OT,N-OT)signal is input while the
servomotor is operating.
Parameter
Parameter
Parameter
Parameter
Meaning
Meaning
Meaning
Meaning
Pn000
b.□□0□
Inputs the forward rotation prohibited(P-OT) signal from
CN1-16(factory setting).
b.□□1□
Disables the forward rotation prohibited (P-OT) signal.
(Allows constant forward rotation.)
b.□0□□
Inputs the reverse rotation prohibited(N-OT) signal from
CN1-17.(factory setting)
b.□1□□
Disables the reverse rotation prohibited(N-OT) signal. (Allows
constant reverse rotation.)
·Applicable control modes: Speed control, position control, and torque control.
·After changing these parameters, turn OFF the main circuit and control power supplies and then turn
them ON againg to enable the new settings.
·A parameter can be used to re-allocate input connector number for the P-OT and N-OT signals. Refer
to
3.2.2
3.2.2
3.2.2
3.2.2 I/O
I/O
I/O
I/O Signal
Signal
Signal
Signal Names
Names
Names
Names and
and
and
and Functions
Functions
Functions
Functions
.
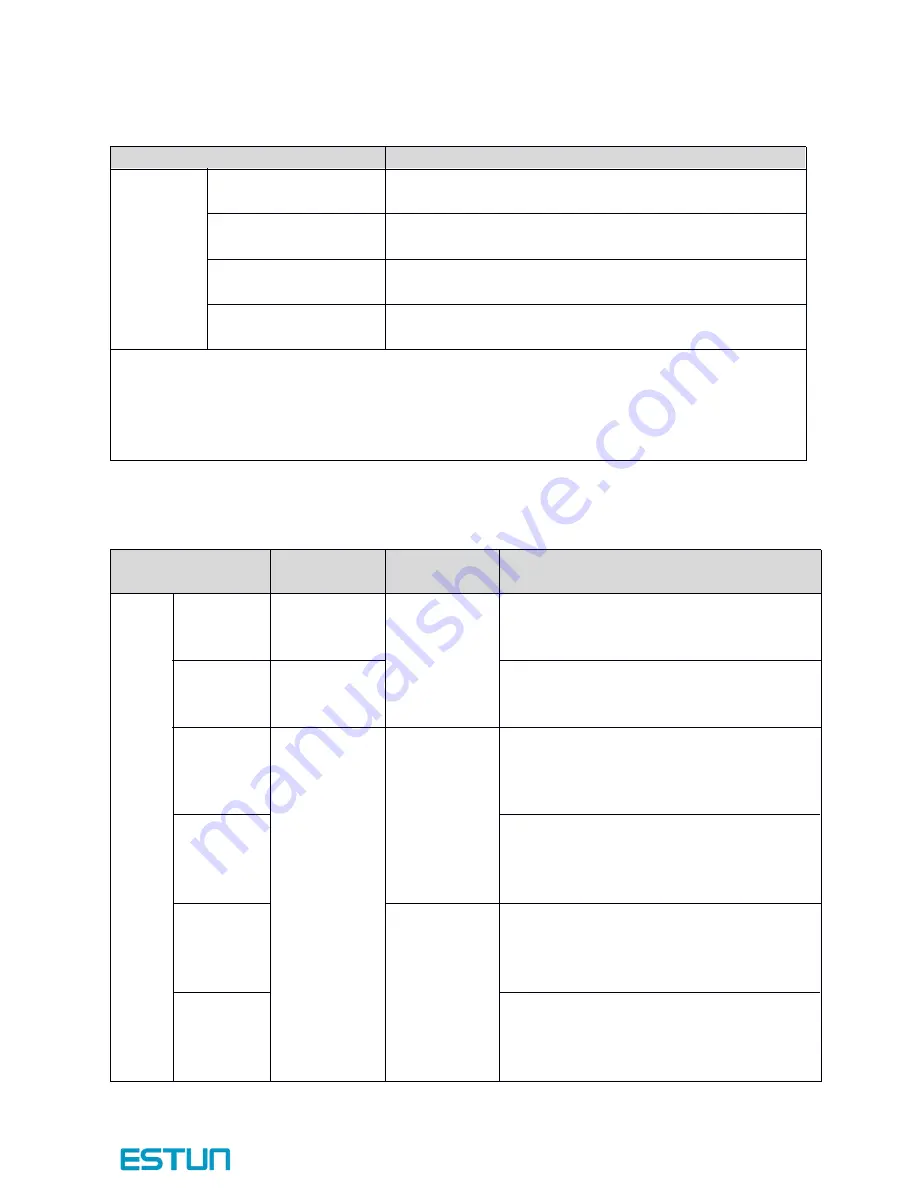
Parameter
Parameter
Parameter
Parameter
Stop
Stop
Stop
Stop Mode
Mode
Mode
Mode
Mode
Mode
Mode
Mode After
After
After
After
Stopping
Stopping
Stopping
Stopping
Meaning
Meaning
Meaning
Meaning
Pn004
H.□□□ 0
Stop by
dynamic brake
Coast
Rapidlly stops the servomotor by dynamic
braking(DB), then places it into coast(power
OFF) mode.
H.□□□ 1
Coast to a
stop
Stops the servomotor in the same way as
when the servo is OFF(coast to a stop ), then
places it into coast(power OFF) mode.
H.□□□ 2
S-OFF
/Overtravel
Coast
Stops the servomotor by dynamic braking (DB)
when servo OFF, stops the servomotor by
plug braking when overtravel, and then places
it into coast (power OFF) mode.
H.□□□ 3
Makes the servomotor coast to a stop state
when servo OFF, stops the servomotor by
plug braking when overtravel, and then places
it into coast (power OFF) mode.
H.□□□ 4
Zero Clamp
Stops the servomotor by dynamic braking (DB)
when servo OFF, stops the servomotor by
plug braking when overtravel, and then places
it into zero clamp mode.
H.□□□ 5
Makes the servomotor coast to a stop state
when servo OFF, stops the servomotor by
plug braking when overtravel, then places it
into zero clamp mode.







































































