





























ProNet series AC servo system User’s manual V.1.08
- 60 -
Parameter
Parameter
Parameter
Parameter
Meaning
Meaning
Meaning
Meaning
Pn005
H.□□0□
Control mode selection:Speed control(analog reference)(factory setting)
Pn300
Speed Reference Input Gain
Setting
Setting
Setting
Setting Range
Range
Range
Range
Setting
Setting
Setting
Setting Unit
Unit
Unit
Unit
Factory
Factory
Factory
Factory Setting
Setting
Setting
Setting
Setting
Setting
Setting
Setting Validation
Validation
Validation
Validation
0
~
3000
rpm/v
150
Immediately
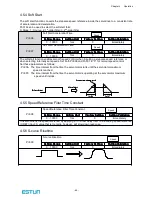
Sets the analog voltage level for the speed reference(V-REF) necessary to operate the servomotor at
the rated speed.
■EXAMPLE
Pn300=150
:
1V input is equivalent to the servomotor speed of 150rpm(factory setting).
Set this slope
Set this slope
Set this slope
Set this slope
R eference voltage
R eference voltage
R eference voltage
R eference voltage
(
V
V
V
V
)
R eference speed
R eference speed
R eference speed
R eference speed
(
m in
m in
m in
m in
----1
1
1
1
))))
Speed
Position
Torque







































































