



























TRIO SCARA Robot Mechanical Unit Operator's Manual
Document Version: V1.8
© 2022 TRIO MOTION TECHNOLOGY
All right reserved.
34
3.2.1.
Equivalent weight
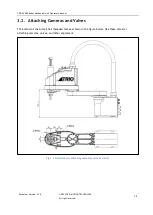
When you attach a camera or valve to the arm, calculate the weight as the equivalent of the shaft. Then
add this to the load. Equivalent weight formula is shown below.
When you attach the equipment near Arm #2:
𝑊
𝑀
= 𝑀(𝐿
1
)
2
/(𝐿
1
+ 𝐿
2
)
2
When you attach the equipment to the end of Arm #2:
𝑊
𝑀
= 𝑀(𝐿
𝑀
)
2
/(𝐿
2
)
2
𝑊
𝑀
:
equivalent weight
𝑀
:
weight of camera etc.
𝐿
1
:
length of Arm #1
𝐿
2
:
length of Arm #2
𝐿
𝑀
:
distance from rotation centre of Joint #2 to centre of gravity
Example:
A “
1kg
” camera is attached to the end of the arm (
550mm away from the rotation centre of Joint #2)
with a load weight of “
1kg
”.
𝑀 = 1
𝐿
2
= 450
𝐿
M
= 550
𝑊
𝑀
= 1 × 550
2
/450
2
= 1.494 → 1.5
(Rounded up)
𝑊 + 𝑊
𝑀
= 1 + 1.5 = 2.5
Enter “2.5” for weight parameter.







































































