












37
11.4. Dynamic Drive Control: Up and Down the Hill
LokPilot V3.0
LokPilot V3.0 DCC
LokPilot V3.0 M4
LokPilot micro V3.0
LokPilot micro V3.0 DCC
LokPilot XL V3.0
Dynamic Drive Control (DCC) of your LokPilot decoder enables
you to adapt load control, as you may desire. Full control over
the entire speed range (constant speed) is not always prototypical.
Therefore you can set the degree to which load control will be
effective between 0 (no load control) and 100% (load
compensation over the full range),
At low speeds it is advisable to have 100% load compensation
in order to prevent the locomotive form „getting stuck“ or from
„running away“ without any load. The impact of load control
should recede with increasing speed in order to have the full
„un-harnessed“ power of the motor available when the throttle
is fully open. Thus, the locomotive will respond to certain changes
in the main line such as gradients. The locomotive will run faster
downhill and become slower climbing the hill.
The desired degree of load control influence is set in CV 56.
It is particularly meaningful to reduce the influence of load control
whenever you run consists. This allows for better driving
properties of all locomotives in the consist.
11.5. Settings for the C-Sinus Motor
LokPilot decoders with the 21MTC interface can drive the new
C-Sinus motors indirectly via the circuit board installed in the
locomotive. The LokPilot can generate all necessary signals
provided you readjust certain settings:
Load compensation must be turned off as described in chapter
11.2.
The control electronics of the motor also need a switched logic
voltage provided by the LokPilot on output AUX4. AUX4 must
therefore be active while the locomotive is stopped and while it
is moving (in both directions!).
LokPilot V3.0
Write the values below into the respective CVs:
CV
CV
CV
CV
CV
V
V
V
V
Value
alue
alue
alue
alue
CV 129
32
CV 132
32
CV 135
32
CV 138
32
LokPilot V3.0 M4
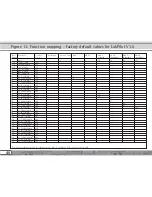
Use the LokProgrammer or the Central Station in order to activate
AUX4 for the stationary locomotive and for the moving locomotive
in both directions as shown in Fig. 16.
Figure 16: settings for c-sinus with LokPilot M4
Summary of Contents for LokPilot Fx micro V3.0
Page 69: ...69 For your personal notes ...