




























SD20-G Series
103
Note: the value of So-16 should not be set too high, please use the Mfr’s value.
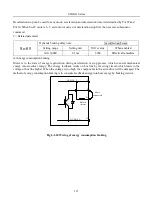
When servo motor stops or the motor speed is lower than So-16, if enable signal is OFF and electromagnetic
braking signal is invalid, after the time set by So-02, servo will be in the disable status.
OFF
OFF
ON
ON
So-02
Servo and motor
enable status
Electromagnetic
braking signal
OFF
OFF
Enable
signal
OFF
ON
OFF
Braking status
OFF
ON
OFF
300ms
100ms
Delay time
Delay time
Fig 6-3-1 Electromagnetic brake sequence diagram
Note: if some alarms occur, servo will turn to disable status, So-02 will be invalid.
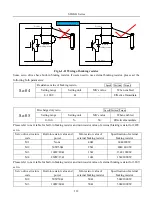
b)
Braking when servo motor is rotating.
When servo motor is rotating and speed is higher than So-16, after alarm occurs, servo drive will become disable
status Immediate, servo motor will free stop. When any of below items occurs, braking signal will be closed:
1.
Speed decreases to setting value of So-16.
2.
Servo drive becomes disabled status, and after delay time of So-03.
So-16
Speed threshold of electromagnetic braking
Speed Position Torque
Setting range
Setting unit
Mfr’s value
When enabled
0~30000
0.1r/min
1000
Effective Immediate
So-03
Delay time for electromagnetic braking stop
Speed Position Torque
Setting range
Setting unit
Mfr’s value
When enabled
10~100
10ms
50
Effective Immediate
Summary of Contents for SD20-G Series
Page 35: ...SD20 G Series 35 M3 structure Fig 3 1 5 Servo drive structure 3...
Page 36: ...SD20 G Series 36 ML3 structure 118 5 5 7 5 93 297 8 223 118 93 0 5 12 5 7 5 4 M4...
Page 38: ...SD20 G Series 38 M4 structure Approx mass 10 365 kg Fig 3 1 7 Servo drive structure 5...
Page 39: ...SD20 G Series 39 M5 structure Approx msaa 11 1Kg Fig 3 1 8 Servo drive structure 6...
Page 40: ...SD20 G Series 40 M6 structure Approx mass 17 4Kg Fig 3 1 9 Servo drive structure 7...
Page 182: ...SD20 G Series 182 Fig 6 4 44SD20E Cam internal frameworkdiagram...







































































