




























SD20-G Series
110
6.1.7 Setting the braking
The braking types of servo drive include three kinds: 1.dynamic braking 2.energy-consumption braking
3. Electromagnetic braking.
(
1
)
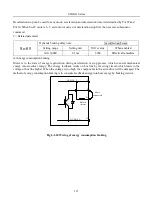
Dynamic braking
Dynamic braking is a common way to stop servo motor. It is a kind of special energy-consumption braking
mode. The braking circuit includes dynamic braking resistor and diode. The method of dynamic braking is to
short-connect drive line coil of servo motor, to shorten motor mechanical feed distance by modes of energy
consumption braking finally.
Servo motor
Servo drive
Fig 6-1-9 Dynamic braking
1
)
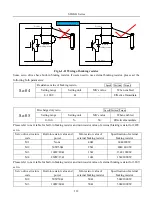
Setting function
Fast enable: after servo is power on, relay is switched on. After enable signal is valid, servo will be ON after 10ms.
!
Caution
Energy-consumption braking is valid after main circuit is powered on.
Electromagnetic braking starts after servo OFF. If it is not, overload malfunction will occur.
Dynamic braking starts after servo OFF or main circuit is powered off. But if motor rotation speed is too
high, dynamic braking resistor will be overheat.
So-07
Servo OFF stop mode
Speed Position Torque
Setting range
Setting unit
Mfr’s value
When enabled
0: Coast stop
1: Dynamic braking
2: Fast enable
3:Deceleration stop
+Coast stop
4: Deceleration stop+
Dynamic braking
5: Deceleration stop+
Fast enable
N/A
0
Effective Immediate
Summary of Contents for SD20-G Series
Page 35: ...SD20 G Series 35 M3 structure Fig 3 1 5 Servo drive structure 3...
Page 36: ...SD20 G Series 36 ML3 structure 118 5 5 7 5 93 297 8 223 118 93 0 5 12 5 7 5 4 M4...
Page 38: ...SD20 G Series 38 M4 structure Approx mass 10 365 kg Fig 3 1 7 Servo drive structure 5...
Page 39: ...SD20 G Series 39 M5 structure Approx msaa 11 1Kg Fig 3 1 8 Servo drive structure 6...
Page 40: ...SD20 G Series 40 M6 structure Approx mass 17 4Kg Fig 3 1 9 Servo drive structure 7...
Page 182: ...SD20 G Series 182 Fig 6 4 44SD20E Cam internal frameworkdiagram...







































































