



























SD20-G Series
198
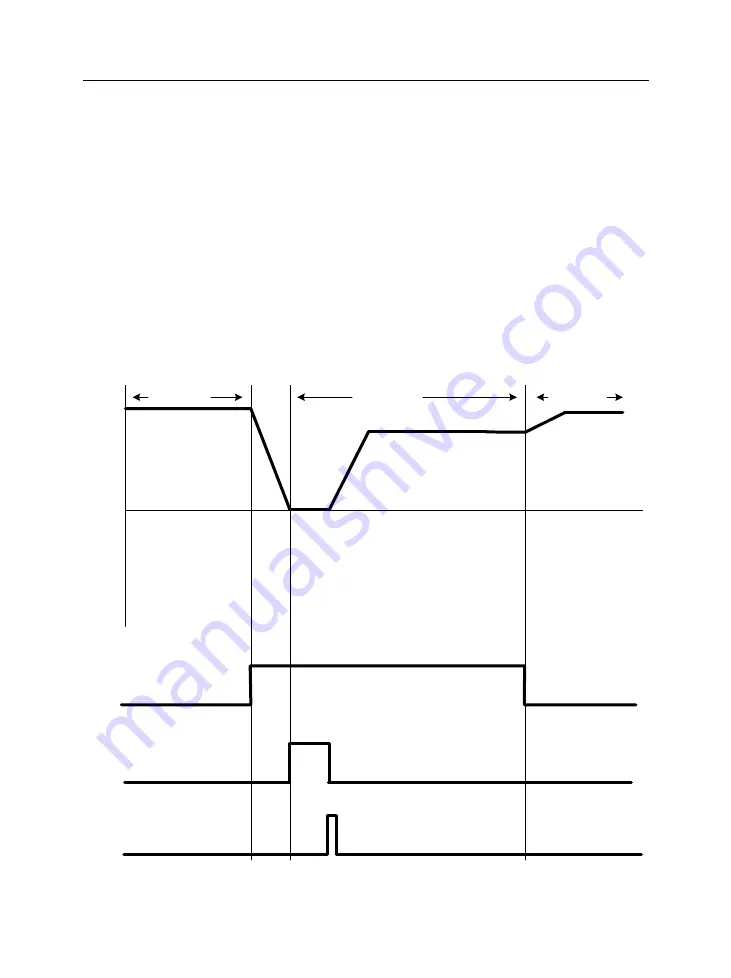
6.5.7 Torque Mode and Internal Register Position Dual Mode
Internal register torque and position switching mode, external analog torque and internal register position
switching mode show as figure 6.56, after servo is enabled, servo runs as internal register position mode
when mode switching signal is enabled; servo runs as torque mode when mode switching signal is
disabled.
In the running process of torque mode, servo slows down to zero according to deceleration time when
mode switching signal is enabled; Servo cannot receive internal register position trigger signal until
switching to internal register position mode after position reach signal output is enabled.
In the running process of internal register position mode, when mode switching signal is disabled, servo
switches to torque mode Immediate and run to target torque according to acceleration and deceleration
time.
Internal Position
Trigger
Torque
Curve
Position Reach
Output
Mode
Switch
Torque Set
switching
Torque Set
Internal
Position
Summary of Contents for SD20-G Series
Page 35: ...SD20 G Series 35 M3 structure Fig 3 1 5 Servo drive structure 3...
Page 36: ...SD20 G Series 36 ML3 structure 118 5 5 7 5 93 297 8 223 118 93 0 5 12 5 7 5 4 M4...
Page 38: ...SD20 G Series 38 M4 structure Approx mass 10 365 kg Fig 3 1 7 Servo drive structure 5...
Page 39: ...SD20 G Series 39 M5 structure Approx msaa 11 1Kg Fig 3 1 8 Servo drive structure 6...
Page 40: ...SD20 G Series 40 M6 structure Approx mass 17 4Kg Fig 3 1 9 Servo drive structure 7...
Page 182: ...SD20 G Series 182 Fig 6 4 44SD20E Cam internal frameworkdiagram...







































































