





























Hub van Doorneweg 8 • 2171 KZ Sassenheim – NL •
T
+31(0)252 228850 •
F
+31(0)252 228235 •
E
sales@euronorm.nl •
I
euronormdrives.com
Hub van Doorneweg 8 • 2171 KZ Sassenheim – NL •
T
+31(0)252 228850 •
F
+31(0)252 228235 •
E
sales@euronorm.nl •
I
euronormdrives.com
46
47
NEURN030000_220_A
NEURN030000_220_A
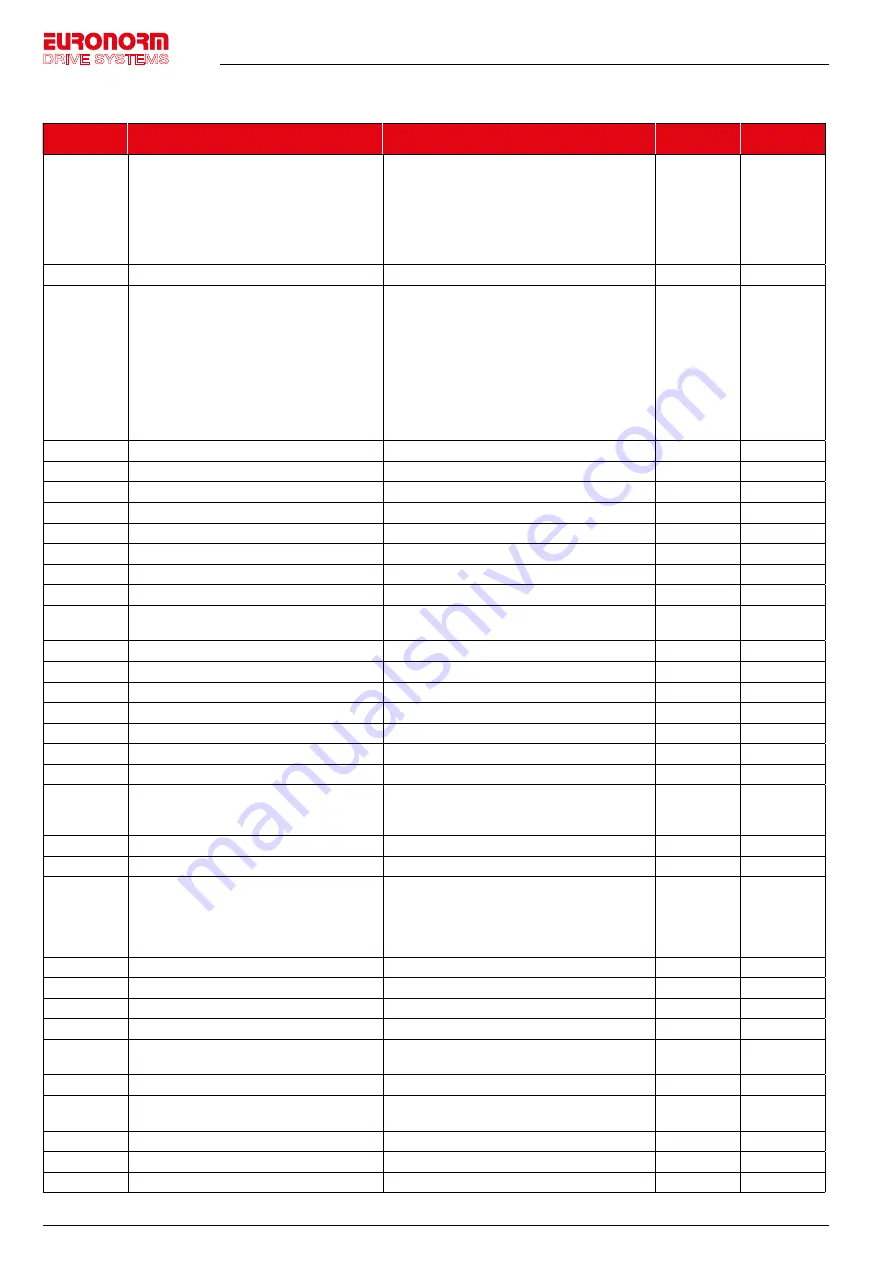
7.1.17 E2 Group - PID function
Code
Parameter name
Setting range
Factory
setting
Change
E2.00
PID setting source
0: E2.01 setting
1: Analog AI1 reference
2: Analog AI2 reference
3: Panel potentiometer setting
4: High-speed pulse setting
5: Communications reference
6: Multi-stage command reference
0
☆
E2.01
PID keyboard reference
0.0%~100.0%
50.0%
☆
E2.02
PID feedback source
0: Analog AI1 reference
1: Analog AI2 reference
2: Panel potentiometer setting
3: AI1-AI2 reference
4: High-speed pulse setting
5: Communications reference
6: AI1+AI2 reference
7: MAX(|AI1|, |AI2|) reference
8: MIN (|AI1|, |AI2|) reference
9: Analog AI3 reference
0
☆
E2.03
PID action direction
0: Positive 1: Negative
0
☆
E2.04
PID setting feedback range
0~65535
1000
☆
E2.05
PID inversion cutoff frequency
0.00~F0.19(Maximum frequency)
0.00Hz
☆
E2.06
PID deviation limit
0.0%~100.0%
2.0%
☆
E2.07
PID differential limiting
0.00%~100.00%
0.10%
☆
E2.08
PID reference change time
0.00s~650.00s
0.00s
☆
E2.09
PID feedback filter time
0.00s~60.00s
0.00s
☆
E2.10
PID output filter time
0.00s~60.00s
0.00s
☆
E2.11
PID feedback loss detection value
0.0%: Not judged feedback loss
0.1%~100.0%
0.0%
☆
E2.12
PID feedback loss detection time
0.0s~20.0s
0.0s
☆
E2.13
Proportional gain KP1
0.0~200.0
80.0
☆
E2.14
Integration time Ti1
0.01s~10.00s
0.50s
☆
E2.15
Differential time Td1
0.00s~10.000s
0.000s
☆
E2.16
Proportional gain KP2
0.0~200.0
20.0
☆
E2.17
Integration time Ti2
0.01s~10.00s
2.00s
☆
E2.18
Differential time Td2
0.00~10.000
0.000s
☆
E2.19
PID parameter switching conditions
0: No switching
1: Switching via terminals
2: Automatically switching according to deviation.
0
☆
E2.20
PID parameter switching deviation 1
0.0%~E2.21
20.0%
☆
E2.21
PID parameter switching deviation 2
E2.20~100.0%
80.0%
☆
E2.22
PID integral properties
Units digit: integral separation
0: Invalid; 1: Valid
Tens digit: Whether stop integration when output
reaches limit
0: Continue; 1: Stop
00
☆
E2.23
PID initial value
0.0%~100.0%
0.0%
☆
E2.24
PID initial value hold time
0.00s~360.00s
0.00s
☆
E2.25
Maximum deviation of twice outputs(Forward)
0.00%~100.00%
1.00%
☆
E2.26
Maximum deviation of twice outputs(Backward) 0.00%~100.00%
1.00%
☆
E2.27
Computing status after PID stop
0: Stop without computing
1: Stop with computing
1
☆
E2.28
reserved
E2.29
PID automatic decrease frequency selection
0: Invalid;
1: Valid
1
☆
E2.30
PID stop frequency
0.00Hz~maximum frequency (F0.19)
25
☆
E2.31
PID checking time
0s~3600s
10
☆
E2.32
PID checking times
1~500
20
☆







































































