




























708#
2SHUDWLQJ
#
WKH
#
&RQYHUWHU
845
&
#
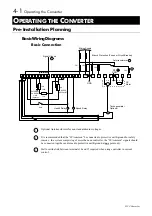
&RQYHUWHU
•
Check switch selection
SW1 ) Speed Range (see table 4.1)
SW2 )
SW3 Tachogenerator / VA (see switch options on page 4.1)
SW4 Zero Speed / Zero Setpoint (see switch options on page 4.1)
SW5 )
SW6 ) Current Calibration (see table 4.2)
SW7 )
SW8 Controller / Calibrated Armature Current Meter Output
•
Check all pots are set thus:-
•
Potentiometers P1, P2, P4, P5, P6, P7 fully Anticlockwise.
•
Potentiometers P3 & P8 mid position.
•
Check transformer supply tap is compatible with the Mains supply voltage. †
•
Check external run contacts are open.
•
Check external set points are all zero.
†
If not use the Auxiliary Supply input at compatible voltage and apply Mains Power at
required level up to 460Vac.
3RZHU
0
8S
Once all the proceeding steps are completed the supply fuses may be replaced and power applied
to the drive. Although fairly general, the following assumes the system to be a simple speed
control drive and motor.
At switch on the “Power ON” LED should illuminate (LED 2 see Page 5.1)
Close RUN contact and give the drive a small speed demand (approximately 10%) and increase
the external auxiliary current limit (if used) to 50%. Slowly increase the main current limit (P4)
until the motor starts to rotate. If the motor increases speed to more than 10% of full speed
immediately turn current limit (P4) fully anticlockwise and/or remove Run signal (terminal 5)
immediately.
If overspeeding occurred while using a tachogenerator for speed feedback correct the wiring as
follows:
Problem
Action
Direction correct but overspeeding:
Reverse tacho polarity only
Direction incorrect and overspeeding:
Reverse field polarity only
When armature voltage feedback is used for speed feedback it is direction insensitive and
overspeeding due to incorrect feedback cannot occur, excess speed is probably due to incorrect
feedback scaling, check setting of switches SW1 and SW2.
If the motor runs under control but in the wrong direction correct as follows either:-
Armature Control
Reverse Field polarity
Tachogenerator Control
Reverse Field & Tachogenerator Polarity
•
Increase speed demand to maximum and check armature voltage does not exceed motor
rating, adjust by P7 to give desired motor speed.
•
Set Minimum Speed by adjusting by P6 to the required level. (note P6 is only active if the
speed setting potentiometer is wired to terminal T4.)
•
Set the Ramp Up time (P1) and Ramp Down time (P2) to the required rates.
•
With armature voltage feedback, speed droop will occur as load is applied to the motor. Set
the IR Compensation (P5) to remove this effect, note excessive adjustment may cause
instability.
Summary of Contents for 512C Series
Page 12: ...507 Q 2YHUYLHZ RI WKH RQYHUWHU 845 RQYHUWHU ...
Page 24: ... QGLFDWLRQV805 845 RQYHUWHU ...
Page 28: ... 05 DXOW LQGLQJ 845 RQYHUWHU ...
Page 30: ...5RXWLQH 0DLQWHQDQFH DQG 5HSDLU 05 845 RQYHUWHU ...
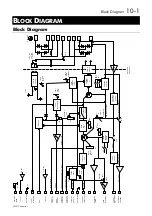
Page 34: ...4305 ORFN LDJUDP 845 RQYHUWHU ...







































































