

















8
LIF TKIT- 0 S
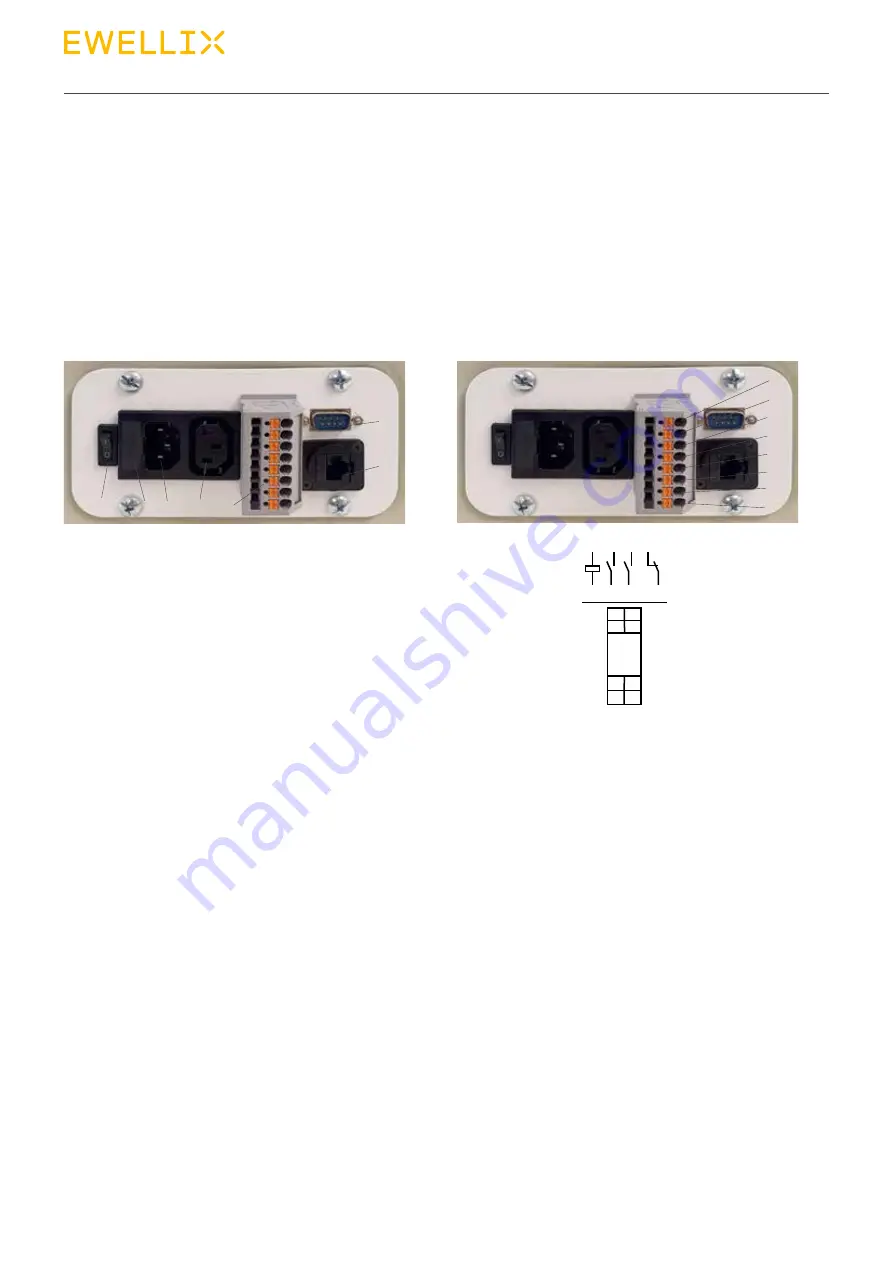
5.0 Hardware connection SBOX
5.1 Hardware connection SBOX
1. On/Off Switch
2. Fuse
3. Power In
4. Power Out
5. I/O Conenctor
6. RS232 Connector
7. Ethernet Connector
8. K1.A1
9. K2.A1
10. K1.A2
11. K2.A2
12. K1.31
13. K1.32
14. K2.31
15. K2.32
A1 14 24 32
A2 13 23
23 24
13 14
A1 A2
31 32
31
1
2 3
4
5
6
7
8
9
10
11
12
13
14
15
5.2 Safety connection
The SBOX-L-01 has two integrated safety relay with forcibly guided contacts. Their coil and feedback contacts are
wired directly to the I/O connector.







































































