





























ExRobotics B.V.
ExR-2 Robot
Operating Guide
Document No.:
20220412IP1
Version No.: 2
Owner:
Ian Peerless
Date:
2022-04-30
Page 14 of 39
This document is considered an uncontrolled copy when printed. Always ensure that you print and use a current version.
Copyright 2022 ExRobotics B.V.
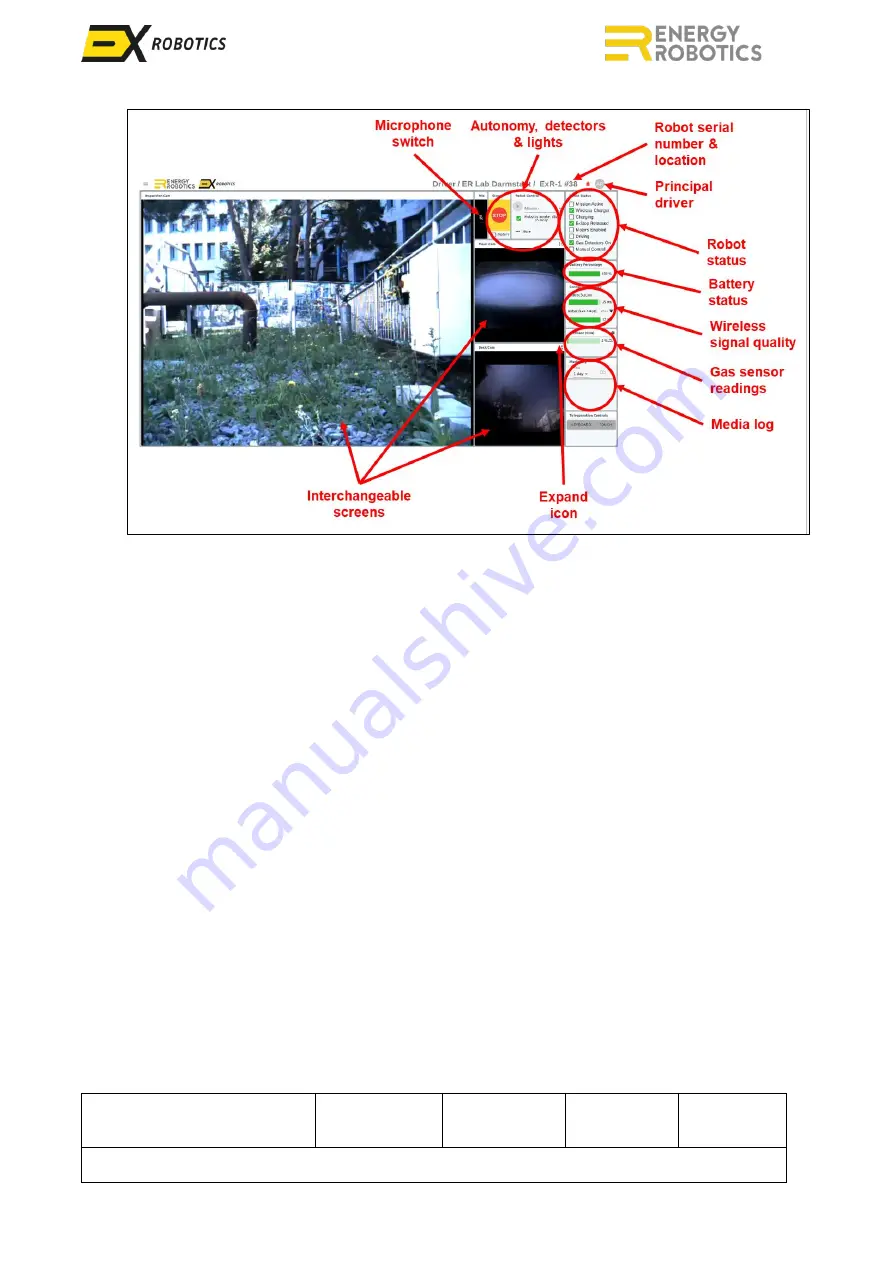
▪
The icons at the top of
the “
Media Log
” can be used to filter the time of the last
events e.g.
images from the last 4 hours. Additionally, the “cloud download” icon
to the right can be used
to download a complete set of recordings as a zip file.
▪
The audio stream of the microphone can be started and paused by clicking on the
“Microphone”
window.
▪
The screen shows the gas levels for those gas detectors that are fitted to the robot. The gas
alarm levels for the robot can be adjusted by clicking on the icon to the top right of each gas
display window. An audio/visual alarm is emitted when the alarm level is exceeded.
▪
The autonomy controls are grouped together. When t
he "Keep Awake”
box is ticked the
robot won’t sleep. If it’
s unticked the robot will save 4G costs and battery power by sleeping
(whether or
not it’s docked).
▪
Select a mission using the drop-down box.
To launch the mission, click on the “Play” button
to the left of the mission drop-down box, to cancel the mission press the button again.
Missions will usually be started when the robot is in a docking station.
However, it’s also
possible to
launch “line
-
following” mission
s when the orange line is visible in the down-facing
camera.
▪
Using the cursor to activate the "Stop” button has the same effect as pressing the emergency
stop switch on the gamepad. The drive motors are isolated until the switch is released. This is
done using “Auto” or the green button on the gamepad.
▪
The gas detectors and lights controls are
accessed by clicking on “More”.
▪
The top right of the screen sh
ows the robot’s status. A tick adjacent to each item indicates:
o
Mission Active
–
robot has been commanded to move and it
’
s not charging anymore.
o
Wireless Charger
–
the robot’s coil is connected to that in the docking station.
o
Charging
–
current is flowing into the battery pack.
o
E-Stop Released
–
the robot’s emergency stop has been released ready to drive.







































































