
























ExRobotics B.V.
ExR-2 Robot
Operating Guide
Document No.:
20220412IP1
Version No.: 2
Owner:
Ian Peerless
Date:
2022-04-30
Page 9 of 39
This document is considered an uncontrolled copy when printed. Always ensure that you print and use a current version.
Copyright 2022 ExRobotics B.V.
When a driver checks the “
Wake Up
”
box the robot video streams will typically appear within 1
minute. The robot is then ready to use.
A power socket module (when fitted) enables the robot to be charged within 4 hours. This requires
the robot to be manually plugged into a power supply using a quick-charger that
’s supplied with the
socket. The quick-
charger’s lead is typically 3 meters long.
If the robot is docked, you should first
switch off power to the induction charger. When inserting the quick-charge plug, rotate the entire
body clockwise before tightening the ring around its base. You can check the status of the charging
using the LEDs and instructions on the quick charger. This video provides more detail:
https://exrobotics.global/media/uploads/mp4/5/8/58_instruction-how-to-connect-the-quick-
charger.mp4
5.
LiDAR Based Navigation, Object Detection and Object Avoidance
ExR-2 robots are usually supplied with a LiDAR module. This is at the heart of autonomous
navigation (see Section 7.4), object detection (which also works during remote controlled missions)
and object avoidance.
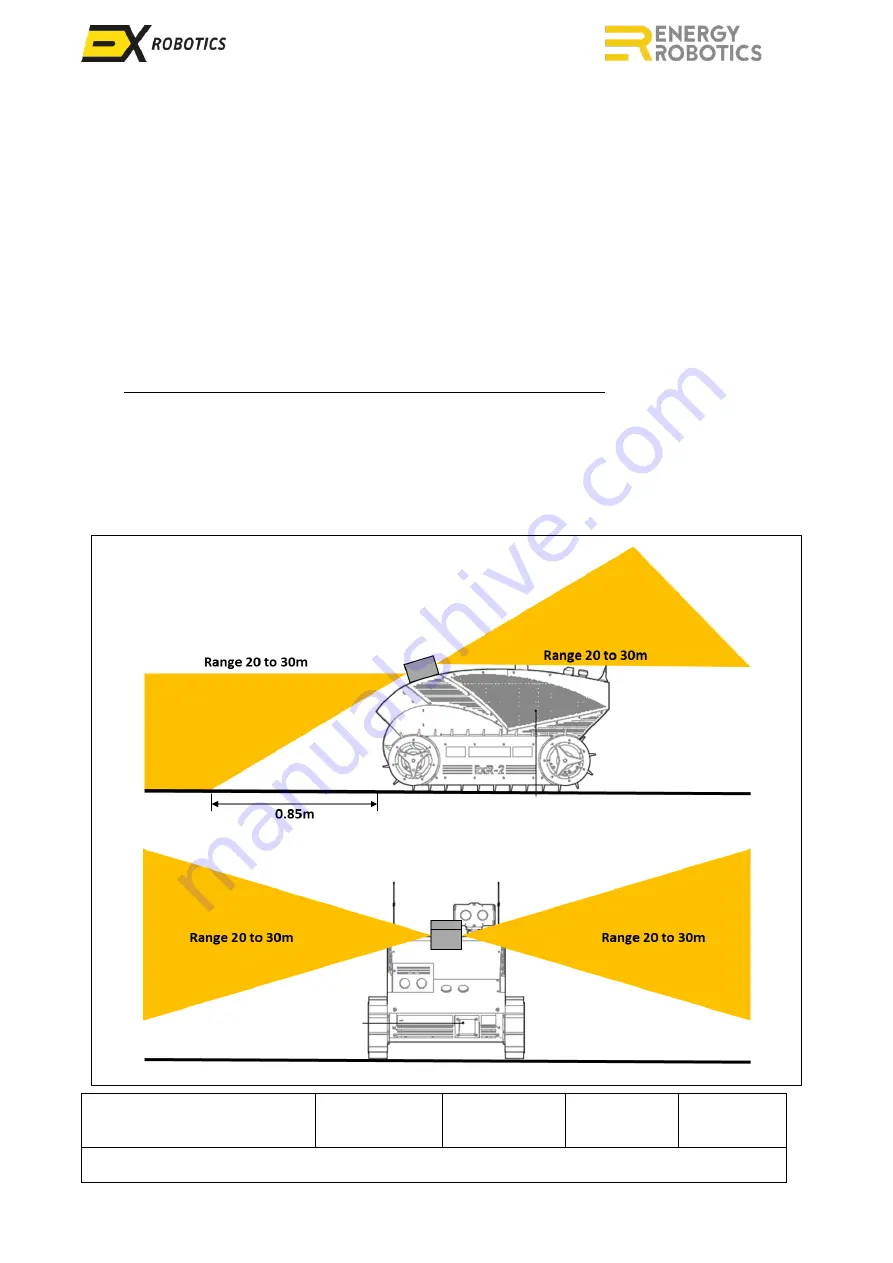
It’s useful to understand how the
LiDAR works before performing missions. It scans the
environment around the robot as indicated in this diagram.





































































