





6
- 5°
T
L
ENGLISH
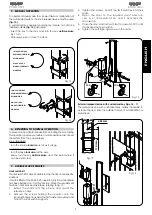
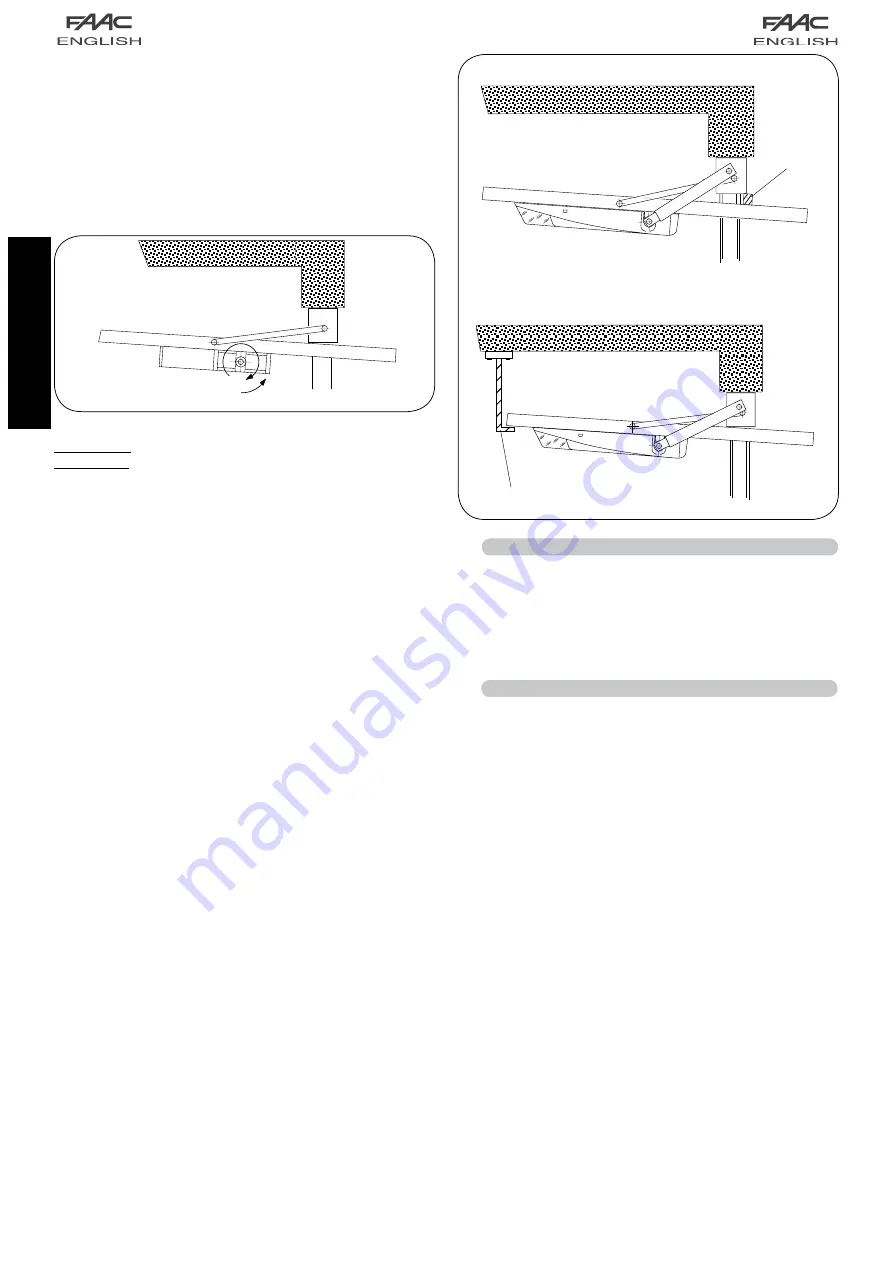
Disconnect the operator and open the garage door as indicated
in
fig.10
and turn the pinion in the direction of the arrow to the
piston limit. Rotate though approx.
5°
in the opposite direction.
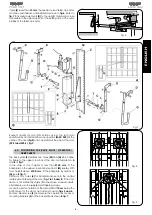
Close the door and fit drive shafts
(T) fig.7
over the operator
pinions and cut to size as shown in
figs. 8/9
. Fit bushings
(C)
and
brackets
(L)
fig. 7
on the drive shafts and secure brackets
(L)
on
the door reinforcement ribbing taking care to maintain correct
alignment of the drive shafts.
Fig. 10
Straight arm
: refer to
fig. 5
.
Curved arm
: refer to
fig. 6.
Open the garage door and position the telescopic arm as
indicated in
figs. 5 or 6
. Cut the
outer profile
at point
A
. Cut the
inner profile
of the telescopic arm at reference point
B
.
N.B.
Leave a gap of about 1 cm at the ends of both profiles.
Insert the drive shafts
(T)
in the inner profile of the telescopic arm
(Q) fig.7,
already cut to size, and drill an 8 mm hole. Secure by
means of an MA8 bolt.
To ensure smooth door closing operation install a cushion pad
(T) fig.11.
Alternatively, to prevent garage door off-balance and
ensure optimal operator functioning, construct and install an
L
bracket as shown in
fig.12
.
Fig. 12
Fig. 11
4.5. ADJUSTING THE COUNTERWEIGHTS
The weight of the counterweights must be increased to ensure
smooth operation. If there is insufficient space to add to the
existing counterweights, remove them and replace them with
blocks of a higher specific weight. Release the operator and
move the door to half-open position (45°). The door should
remain in balance.
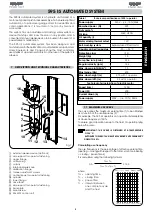
4.6. DOUBLE APPLICATION
For up-and-over doors 3.50 to 5 m wide, one 595 I (integrated)
operator and one 595 S (slave) operator must be used. The
maximum permitted height is 3 m. Install in the same way
as for a single motor
(fig. 9)
. The electrical connection of
the SLAVE drive unit must be made on the control unit of the
MASTER operator. Connect the power cables of the SLAVE operator
in parallel with those of the MASTER, taking care to respect the
assignments and rotation direction.
Add the one supplied with the SLAVE operator in parallel with the
existing thrust capacitor.
Summary of Contents for 595
Page 1: ...595...