




























Shenzhen Hpmont Technology Co., Ltd.
Chapter 7 Elevator Application Guidance
HD3N-L Series User Manual V1.0
- 51
-
7.2
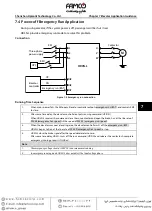
Terminal MS Run Application
The elevator controller can calculate the motor present running direction (digital) and objective speed
(digital) according to the elevator control logic and send them to HD3N-L.
HD3N-L receives the objective speed of MS form and calculate the speed curve according to the S-
curve parameter setting, then control the motor to run.
Example
A certain elevator with rated speed of 1.000m/s uses a controller in terminal MS control (F00.05 = 2).
The elevator controller controls the run contactor and HD3N-L controls the brake. Receiving the signal
of "running", the brake opens. Receiving the signal of "zero-speed running", the brake closes.
The inspection running is controlled by inspection MS command of elevator controller, and the
running speed is obtained by speed combination of MS terminal.
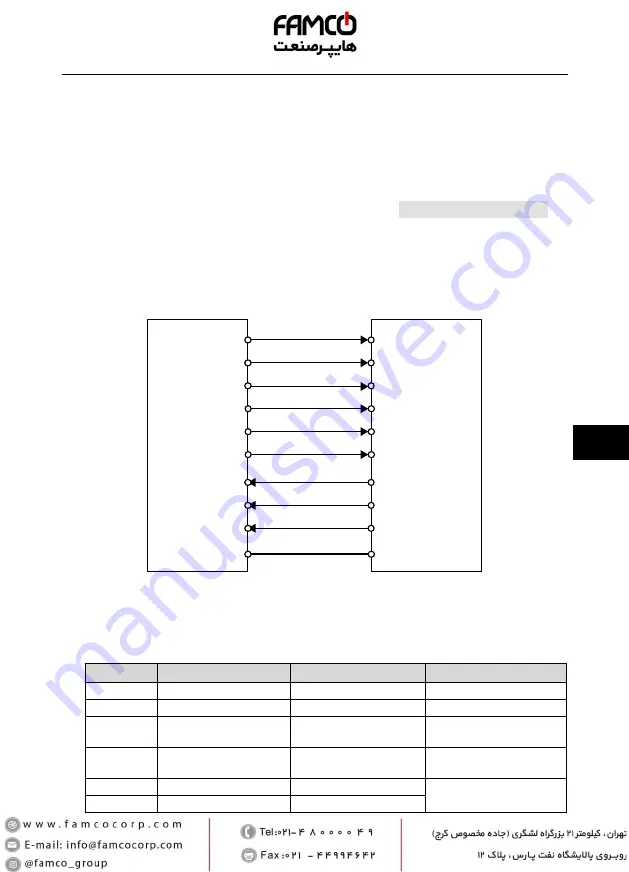
Control Part Connection
Figure 7-2 Terminal MS running connection
Set Parameters
The setting content of terminal MS general function is shown as Figure 7-1, and setting content of
special function is shown as Figure 7-2.
Table 7-1 General parameter
Ref. Code
Function
Value
Remark
F00.01
Control mode
Depend on actual value
F00.02
Elevator rated speed
Depend on actual value
F00.03
Controller Max. output
frequency
Depend on actual value
F00.04
Motor mechanical parameter
Depend on actual calculate
value
F07.00
Motor rated power
Depend on actual value
Motor nameplate parameters
F07.01
Motor rated voltage
Depend on actual value
HD3N-L
COM
DI1
DI2
DI3
DI4
DI5
DI6
RLY1
DO1
DO2
Elevator
controller
Controller enabled (EN)
Multi-speed 1 (MS1)
Multi-speed 2 (MS2)
Multi-speed 3 (MS3)
Controller fault
Running
Zero-speed running
UP
DN
7







































































